[论文解读] Aerostack2: A Software Framework for Developing Multi-robot Aerial Systems
Aerostack2 是一个基于 ROS 2 的开源、平台无关的框架,模块化支持具有逻辑任务规范、可重用组件和编队能力的多机器人空中系统,在仿真和真实飞行中得到验证。
The development of autonomous aerial systems, particularly for multi-robot configurations, is a complex challenge requiring multidisciplinary expertise. Unlike ground robotics, aerial robotics has seen limited standardization, leading to fragmented development efforts. To address this gap, we introduce Aerostack2, a comprehensive, open-source ROS 2 based framework designed for creating versatile and robust multi-robot aerial systems. Aerostack2 features platform independence, a modular plugin architecture, and behavior-based mission control, enabling easy customization and integration across various platforms. In this paper, we detail the full architecture of Aerostack2, which has been tested with several platforms in both simulation and real flights. We demonstrate its effectiveness through multiple validation scenarios, highlighting its potential to accelerate innovation and enhance collaboration in the aerial robotics community.
研究动机与目标
- 通过提供标准、协作框架解决航空机器人软件的碎片化问题。
- 建立在 ROS 2 之上、面向自主空中作业的模块化、平台无关环境。
- 实现可重用组件和子系统,以加速完整控制体系结构的开发。
- 通过共同的数据通道和接口,支持多机器人编队与异构平台。
- 通过开源工具实现仿真到现实的转移以及社区驱动开发。
提出的方法
- 提出 Aerostack2 作为 Aerostack 的演进,建立在 ROS 2 上,具备面向多机器人的模块化体系结构。
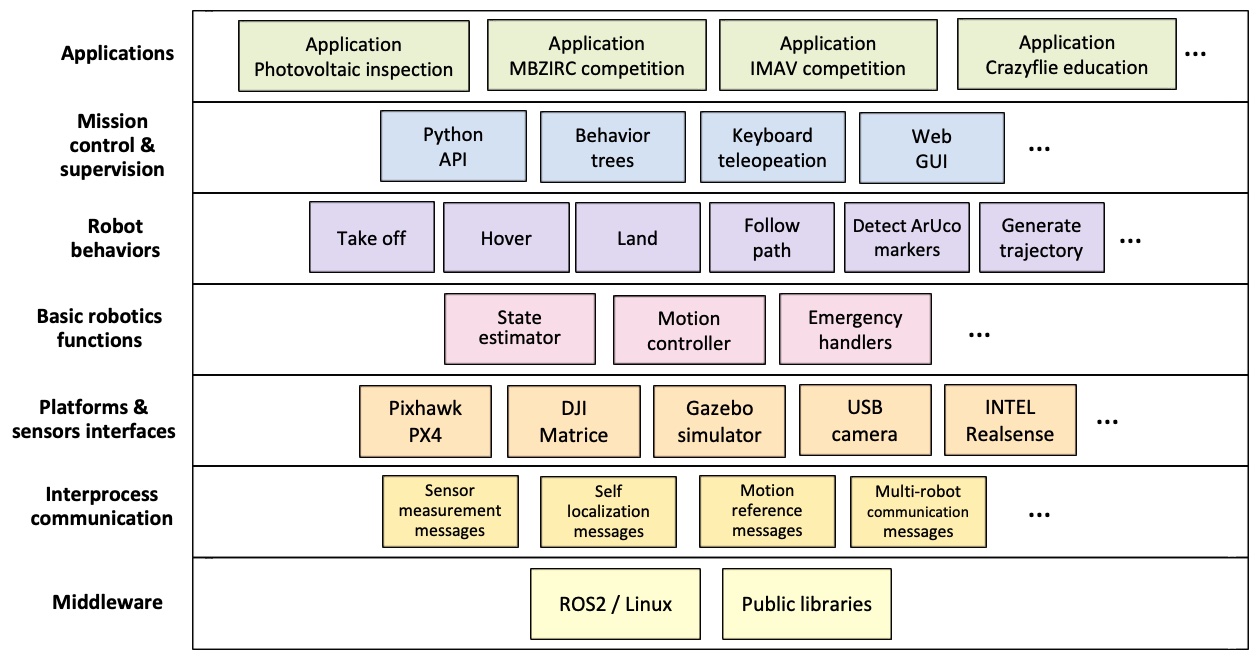
- 定义具有层次的软件栈,层次为:中间件、进程间通信、平台/传感器接口、基本机器人功能、行为、任务控制和应用。
- 实施标准的进程间数据通道,使用 ROS 2 主题/服务/动作和平台无关的数据表示。
- 将基本机器人功能(运动控制和状态估计)设计为可插拔插件,由管理器和插件选择器选择。
- 使用专门的行为组件封装技能(例如起飞、悬停、跟随轨迹),带有执行监控和基于 ROS 2 的动作接口。
- 提供任务规范工具(Python API 和行为树)以及用于计划、监控和监督任务的基于网络的 GUI。
实验结果
研究问题
- RQ1如何标准化航空机器人软件以实现研究组之间的重用和协作?
- RQ2基于 ROS 2 构建的模块化、多机器人框架是否能够在保持插件可扩展性的同时支持异构的无人机平台与仿真?
- RQ3在航空系统中,哪些机制能实现可靠的任务规范、执行监控和编队协调?
- RQ4Aerostack2 在不同平台和传感器之间在仿真与现实部署之间能多大程度地桥接?
主要发现
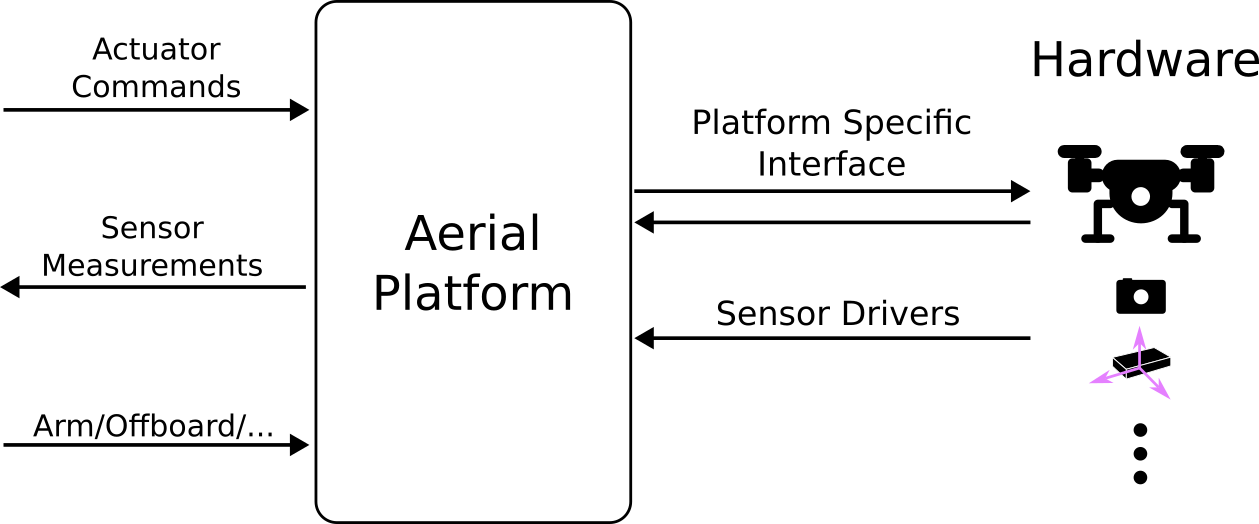
- Aerostack2 展示了在多种无人机平台(例如 Pixhawk、DJI)上的平台无关性和模块化。
- 该框架支持从飞行控制到定位、规划和机间通信等广泛能力。
- 一个逻辑任务层(行为)简化了任务规范,相较于低级别的 ROS 2 编程。
- Python API 与行为树的整合提供了灵活的任务规划与监控工具。
- 实验表明在通过闸门的任务中实现最小变更的仿真到现实转移(平台和状态估计插件)。
- 异构编队使用不同平台(如 Pixhawk F450 和 DJI M210)得到展示,验证了多平台编队能力。
更好的研究,从现在开始
从论文设计到论文写作,大幅缩短您的研究时间。
无需绑定信用卡
本解读由 AI 生成,并经人工编辑审核。