[论文解读] From Model-Based to Data-Driven Simulation: Challenges and Trends in Autonomous Driving
简要:对自动驾驶仿真的方法进行综述,强调从基于模型向数据驱动与混合神经仿真的转变,并概述内容、行为与感知真实性挑战,以及标准化与有效性问题。
Simulation is an integral part in the process of developing autonomous vehicles and advantageous for training, validation, and verification of driving functions. Even though simulations come with a series of benefits compared to real-world experiments, various challenges still prevent virtual testing from entirely replacing physical test-drives. Our work provides an overview of these challenges with regard to different aspects and types of simulation and subsumes current trends to overcome them. We cover aspects around perception-, behavior- and content-realism as well as general hurdles in the domain of simulation. Among others, we observe a trend of data-driven, generative approaches and high-fidelity data synthesis to increasingly replace model-based simulation.
研究动机与目标
- 澄清自动驾驶仿真方法的分层分类,以及它们在真实感与方法学上的差异。
- 识别AV仿真在内容、行为与感知真实性方面当前的挑战。
- 强调新兴的数据驱动与神经仿真趋势,作为解决真实性差距的方案。
- 讨论横向挑战,如标准化、数据/计算需求与可转移性。
- 为未来研究方向和AV仿真中的待解问题提供指导。
提出的方法
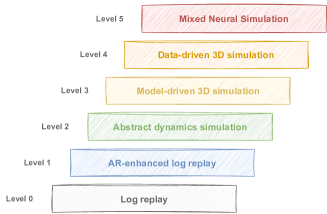
- 提出从日志回放到混合神经仿真的一层级分类法。
- 在内容真实性、行为真实性和感知真实性方面综述文献以映射趋势。
- 分析与每个真实性维度相关的挑战与趋势。
- 综合数据驱动方法(如NeRFs、扩散模型、GANs)及其对内容真实性的影响。
- 讨论数据驱动与基于模型的仿真的优缺点,以及混合方法的潜力。
![Figure 1 : Examples of our proposed simulation levels. Top-left to bottom-right: AR-enhanced (level 1), SUMO (level 2), CARLA (level 3), Block-NeRF (level 4) [ 59 ] .](https://ar5iv.labs.arxiv.org/html/2305.13960/assets/img/screenshots_merged.png)
实验结果
研究问题
- RQ1如何将自动驾驶仿真方法分类,以反映不同的真实感和方法层级?
- RQ2在实现AV仿真中的内容、行为与感知真实感方面存在哪些关键挑战?
- RQ3哪些趋势与方法正在出现以解决真实性差距,它们如何影响未来的仿真层级?
- RQ4哪些横向挑战(标准化、数据/计算、有效性、可转移性)影响新仿真范式的采用?
主要发现
- 提出一个从0到5的分层仿真水平方案,用于通过内容、动力学和传感器的仿真来比较AV仿真器。
- 内容真实性越来越多地由数据驱动方法(如NeRFs、GANs、扩散模型)和程序化内容支持,减少对手工制作资产的依赖。
- 行为真实性正在向基于ML的序列模型、变换器、对抗性强化学习以及知识引导方法发展,以更好地捕捉长尾和关键情景。
- 感知真实性受益于数据驱动的传感器建模、少样本学习和学习得到的噪声模型,以提高相机、激光雷达和雷达的保真度。
- 横向挑战包括标准化(OpenSCENARIO/OpenDRIVE/OpenOSI)、数据/计算需求,以及对仿真有效性和可转移性的评估。
- 总体而言,该领域正趋向于更高水平的数据驱动与混合神经仿真,仍有若干待解的研究问题。
更好的研究,从现在开始
从论文设计到论文写作,大幅缩短您的研究时间。
无需绑定信用卡
本解读由 AI 生成,并经人工编辑审核。