[论文解读] Traj-LIO: A Resilient Multi-LiDAR Multi-IMU State Estimator Through Sparse Gaussian Process
Traj-LIO 提供一个连续时间、基于高斯过程的多 LiDAR 和多 IMU 状态估计器,它是自驱动的(不依赖 IMU),并通过在 SO(3) 和向量空间中解耦旋转与平移,对传感器故障具有鲁棒性。
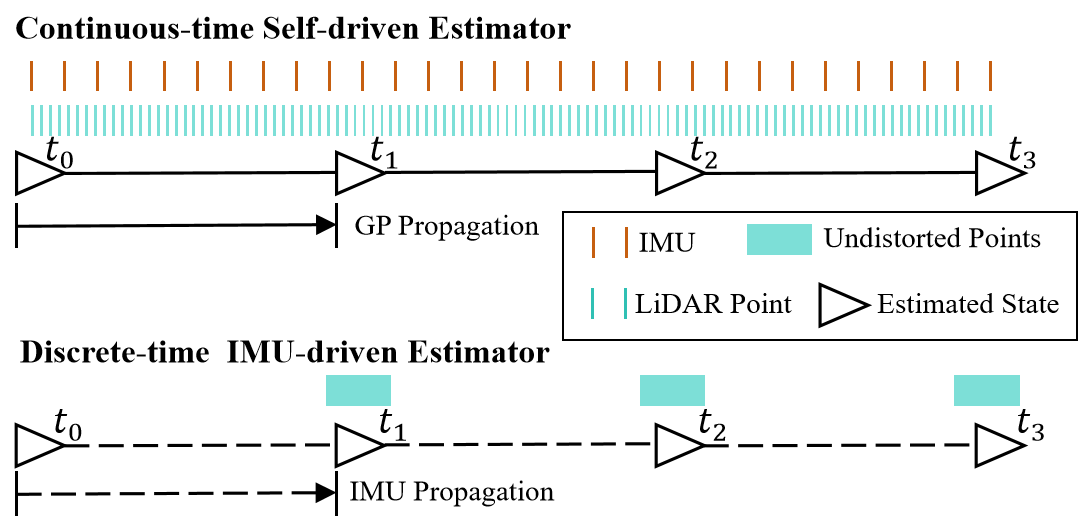
Nowadays, sensor suits have been equipped with redundant LiDARs and IMUs to mitigate the risks associated with sensor failure. It is challenging for the previous discrete-time and IMU-driven kinematic systems to incorporate multiple asynchronized sensors, which are susceptible to abnormal IMU data. To address these limitations, we introduce a multi-LiDAR multi-IMU state estimator by taking advantage of Gaussian Process (GP) that predicts a non-parametric continuous-time trajectory to capture sensors' spatial-temporal movement with limited control states. Since the kinematic model driven by three types of linear time-invariant stochastic differential equations are independent of external sensor measurements, our proposed approach is capable of handling different sensor configurations and resilient to sensor failures. Moreover, we replace the conventional $\mathrm{SE}(3)$ state representation with the combination of $\mathrm{SO}(3)$ and vector space, which enables GP-based LiDAR-inertial system to fulfill the real-time requirement. Extensive experiments on the public datasets demonstrate the versatility and resilience of our proposed multi-LiDAR multi-IMU state estimator. To contribute to the community, we will make our source code publicly available.
研究动机与目标
- 在潜在传感器故障期间,使用冗余、异步的 LiDAR 与 IMU 时,推动稳健的状态估计。
- 开发一个连续时间、基于 GP 的框架,在不依赖固定离散时间流水线的情况下融合多传感器。
- 解耦旋转与平移,以实现分析雅可比矩阵并在 LiDAR-惯性里程计中实现实时性能。
- 提供一个由 GP 先验驱动的自驱动运动学模型,与 IMU 数据独立,以增强鲁棒性。
提出的方法
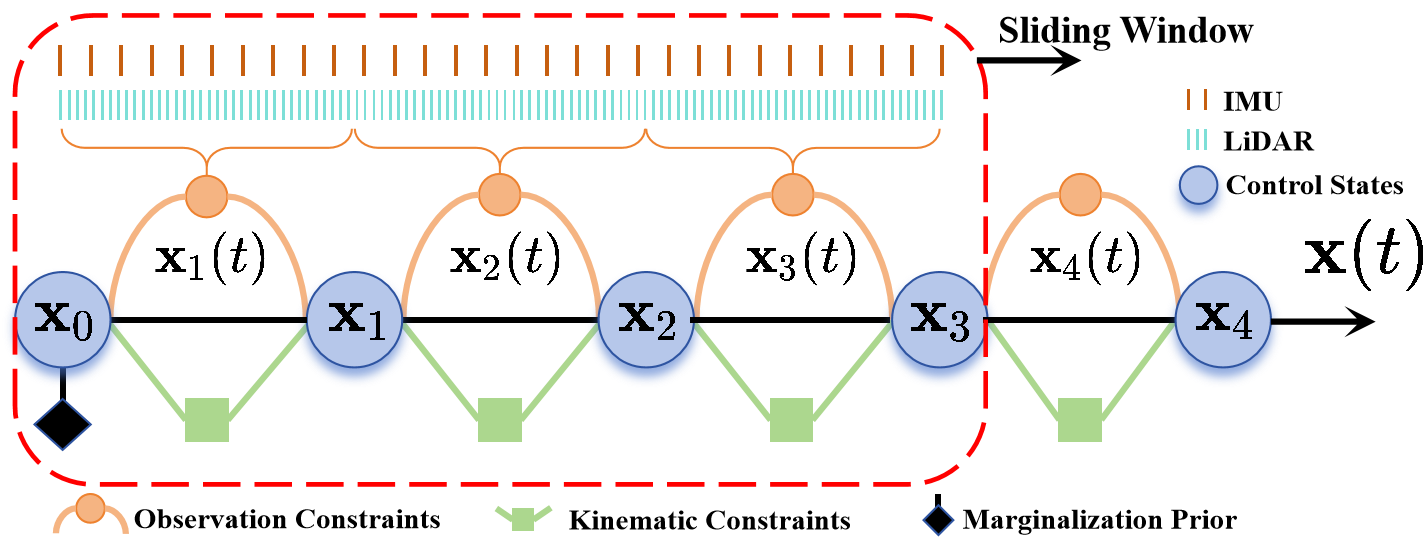
- 用一个时间窗上的高斯过程表示连续时间状态 x(t),通过插值在任意时间戳进行查询。
- 在向量空间使用三个 GP 先验(Random Walk、Constant Velocity、Constant Acceleration),并在 SO(3) 上采用流形感知的 GP 来建模旋转。
- 将旋转(SO(3))与平移(向量空间)解耦,以简化雅可比矩阵并整合 IMU 测量。
- 采用由稀疏 GP 先验驱动的自驱动运动学模型,在传播时不依赖 IMU 输入。
- 将状态估计表述为一个带分段 LTISDE 的稀疏 GP 回归,并给出解析雅可比以实现实时性能。
- 采用连续时间滑动窗口优化,在对旧状态边缘化的同时对传感器测量在其时间戳处进行插值。
实验结果
研究问题
- RQ1如何在不需要同步传感测量的情况下,将多 LiDAR 多 IMU 系统在连续时间框架中融合?
- RQ2当部分 IMU 或 LiDAR 失效或数据下降时,基于 GP 的自驱动运动学模型能否保持精度和鲁棒性?
- RQ3解耦旋转与平移是否提高计算效率并实现基于 GP 的实时 LiDAR-惯性里程计?
- RQ4所提出的方法在处理各种传感器配置方面能够达到多大程度的鲁棒性,并在公开数据集上仍然达到有竞争力的精度?
主要发现
- 该方法通过将所有传感输入视为 GP 基于、自驱动运动学模型中的测量来实现对传感器故障的鲁棒性。
- 将旋转(SO(3))与平移解耦可实现解析雅可比并支持基于 GP 的估计的实时性能。
- 该方法支持灵活的传感器配置,包括多个 LiDAR 和多个 IMU,并具有连续时间轨迹表示。
- GP 先验内的插值允许在任意时间戳查询状态,减少对密集离散状态的需求。
- 该框架在从手持设备到高强度 UAV 数据集上的精度具有竞争力,体现出多样性。
更好的研究,从现在开始
从论文设计到论文写作,大幅缩短您的研究时间。
无需绑定信用卡
本解读由 AI 生成,并经人工编辑审核。