[论文解读] ZeroNVS: Zero-Shot 360-Degree View Synthesis from a Single Image
ZeroNVS 在多样化真实场景数据上训练一个 3D 感知扩散模型,从单张图像合成360度新视图,引入相机条件与 SDS 锚定,以在 DTU 和 Mip-NeRF 360 基准测试中实现零-shot 的最先进性能。
We introduce a 3D-aware diffusion model, ZeroNVS, for single-image novel view synthesis for in-the-wild scenes. While existing methods are designed for single objects with masked backgrounds, we propose new techniques to address challenges introduced by in-the-wild multi-object scenes with complex backgrounds. Specifically, we train a generative prior on a mixture of data sources that capture object-centric, indoor, and outdoor scenes. To address issues from data mixture such as depth-scale ambiguity, we propose a novel camera conditioning parameterization and normalization scheme. Further, we observe that Score Distillation Sampling (SDS) tends to truncate the distribution of complex backgrounds during distillation of 360-degree scenes, and propose "SDS anchoring" to improve the diversity of synthesized novel views. Our model sets a new state-of-the-art result in LPIPS on the DTU dataset in the zero-shot setting, even outperforming methods specifically trained on DTU. We further adapt the challenging Mip-NeRF 360 dataset as a new benchmark for single-image novel view synthesis, and demonstrate strong performance in this setting. Our code and data are at http://kylesargent.github.io/zeronvs/
研究动机与目标
- 面向野外场景中的多物体和复杂背景,解决零-shot 的 360 度新视图合成。
- 开发一个基于扩散的先验,基于大量真实场景数据集混合(CO3D、RealEstate10K、ACID)训练,以应对多样几何形状和背景。
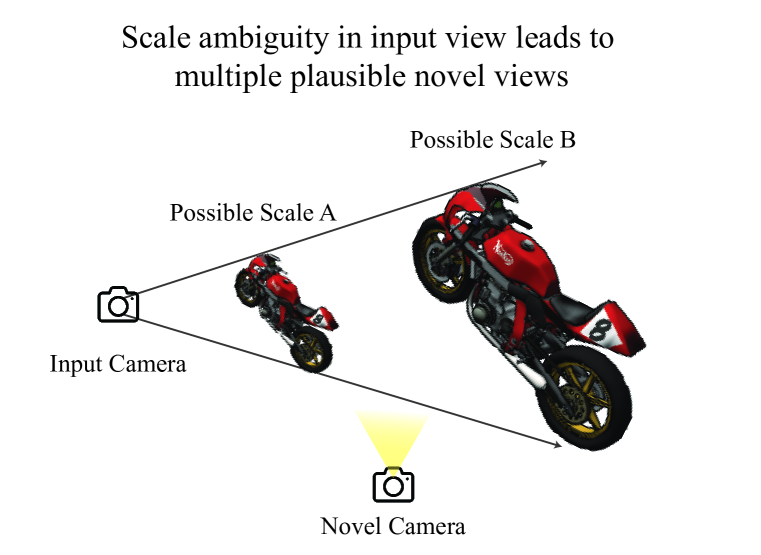
- 创建鲁棒的相机条件化方案和场景归一化,以解决尺度歧义并提升3D一致性。
- 通过SDS锚定来缓解基于SDS蒸馏的背景多样性损失,促进多样且可信的背景。
- 展示强大的零-shot 泛化能力,并建立一个新的场景级单图像 NVS 基准(Mip-NeRF 360)。
提出的方法
- 训练一个二维条件扩散模型,然后进行三维 SDS 蒸馏,以从单张图像获得3D一致的新视图。
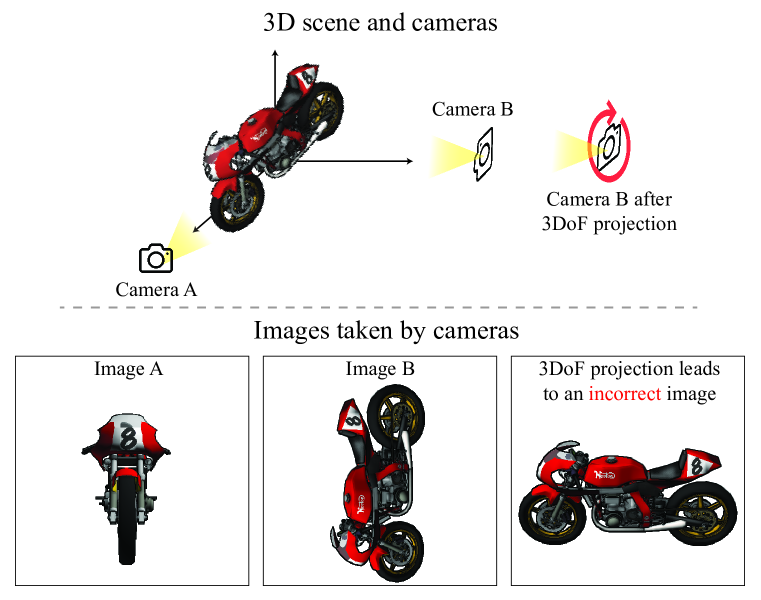
- 引入一个6DoF+1 相机条件表示(含视场的相对位姿)和一个以观察者为中心的归一化方案,以处理野外数据中的尺度与姿势变化。
- 使用深度统计得到的场景尺度参数 q 来归一化相机平移,以降低尺度歧义。
- 在训练期间应用深度填充的密集图以实现一致的尺度估计,通过一种新的归一化,称为 6DoF+1, viewer,使跨数据集的条件统一。
- 提出 SDS 锚定:使用 DDIM 采样多个锚视图,然后在 SDS 优化期间将最近的锚视图用作条件,以增加背景多样性。
- 在 DTU 上进行 LPIPS、PSNR、SSIM 的零-shot 评估,并将 Mip-NeRF 360 作为一个新的零-shot 场景级 NVS 基准进行引入。
实验结果
研究问题
- RQ1如何通过在多样真实场景上训练的基于扩散的先验,使得从单张图像实现零-shot 的360度新视图合成?
- RQ2在野外场景中,哪些相机条件化和归一化策略最能应对尺度和姿势的不确定性?
- RQ3在不牺牲3D一致性的前提下,能否在基于SDS的蒸馏用于场景级NVS 时提升背景多样性?
主要发现
- ZeroNVS 在 DTU 的零-shot 设置下实现最先进的 LPIPS,超过在 DTU 上训练的方法。
- 在 Mip-NeRF 360 上,ZeroNVS 在零-shot 基线中取得最佳 LPIPS。
- 以深度信息驱动的尺度归一化的观察者中心 6DoF+1 条件化,提升 2D-to-3D 条件化与跨多样数据集(CO3D、ACID、RealEstate10K)的泛化。
- SDS 锚定提高背景多样性,在用户研究中被认为更真实、更具创造性。
- 消融实验表明,在 CO3D、ACID、RealEstate10K 的混合训练,在所有评估数据集上均提升性能。
更好的研究,从现在开始
从论文设计到论文写作,大幅缩短您的研究时间。
无需绑定信用卡
本解读由 AI 生成,并经人工编辑审核。