[논문 리뷰] Active flow control for three-dimensional cylinders through deep reinforcement learning
논문은 CFD 해석기와 PPO로 연결된 다중 에이전트 심층 강화학습(MARL)을 이용해 실린더 표면의 여러 제로-넷 질량 유량 제트를 제어하여 3D 실린더의 항력을 감소시키는 것을 성공적으로 보여준다.
This paper presents for the first time successful results of active flow control with multiple independently controlled zero-net-mass-flux synthetic jets. The jets are placed on a three-dimensional cylinder along its span with the aim of reducing the drag coefficient. The method is based on a deep-reinforcement-learning framework that couples a computational-fluid-dynamics solver with an agent using the proximal-policy-optimization algorithm. We implement a multi-agent reinforcement-learning framework which offers numerous advantages: it exploits local invariants, makes the control adaptable to different geometries, facilitates transfer learning and cross-application of agents and results in significant training speedup. In this contribution we report significant drag reduction after applying the DRL-based control in three different configurations of the problem.
연구 동기 및 목표
- DRL 기반 활성 흐름 제어를 2D에서 3D 실린더로 확장하고 표면 액추에이터를 다수 배치한다.
- 높은 차원의 제트 제어를 관리하기 위해 지역적 관찰을 활용하여 학습 비용의 부담 없이 다중 에이전트 협력을 구현한다.
- 다양한 Reynolds 수 및 기하 구성에서의 항력 감소 성능을 평가한다.
- 3D 와이크 제어에 대한 MARL 벤치마크를 제공하고 액추에이터 배치 및 관찰 선택에 대한 통찰을 제시한다.
제안 방법
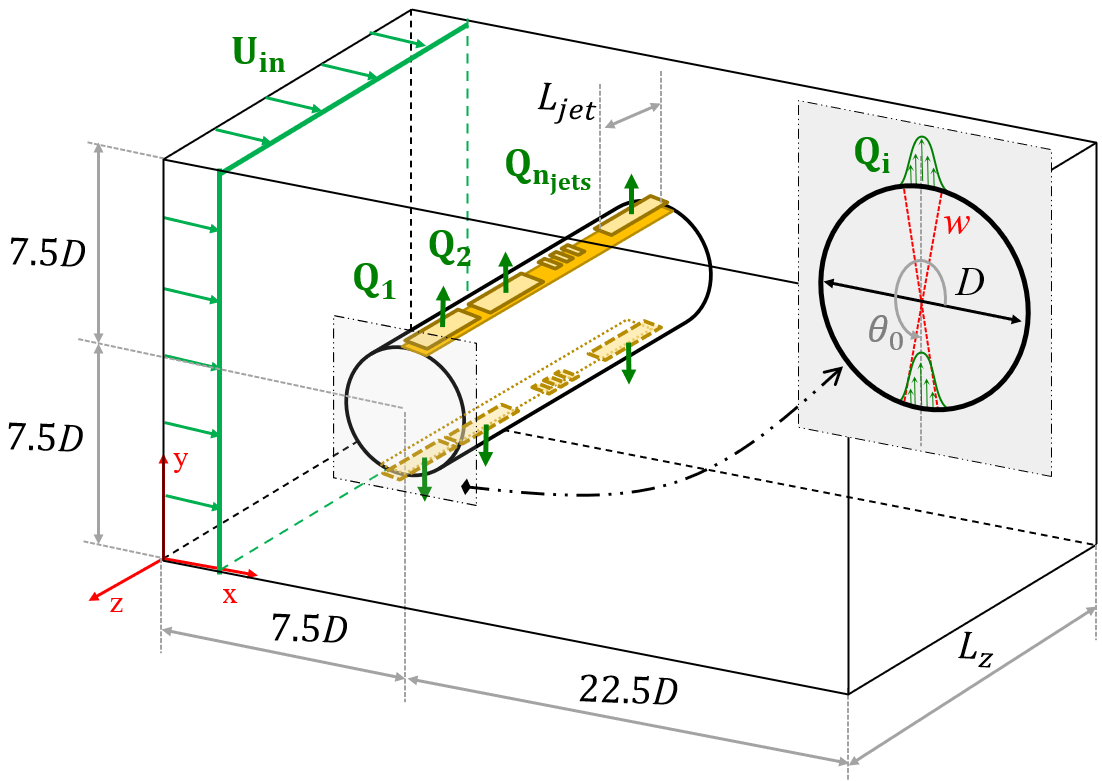
- Alya CFD 해석기(유한요소 나비에-스토크스)와 다중 에이전트 PPO 프레임워크를 연결한다.
- 질량 유량 Q를 가진 스판와이드 제트를 제어하기 위해 신경망 가중치를 공유하는 여러 독립 에이전트를 배치한다.
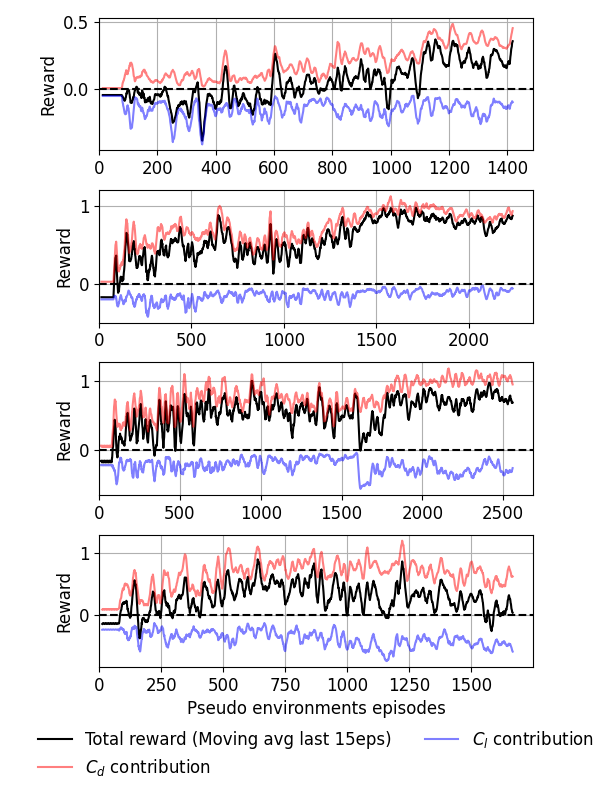
- 드래그 감소 및 양력 페널티를 기반으로 한 로컬 및 글로벌 보상을 정의하고 β=0.8로 균형을 맞춘다.
- 의사-환경당 85개의 프로브 슬라이스를 사용해 와이크 상태를 관찰하고, 주변 프로브를 포함해 255-프로브 관찰을 형성할 수 있다.
- Q 스케일링으로 Q_max3D = 2 * Q_max2D를 사용해 정책 출력을 제트 작동으로 매핑하고, 환경당 순 질량 흐름을 보장하기 위해 반대 제트 동작을 강제한다.
실험 결과
연구 질문
- RQ1MARL이 지역적으로 작동하는 에이전트와 함께 3D 실린더의 다중 표면 제트를 제어해 다양한 Reynolds 수에서 항력을 감소시킬 수 있는가?
- RQ2인접한 와이크 관찰 및 서로 다른 Spanwise 도메인 크기를 도입하는 것이 학습 및 성능에 어떤 영향을 미치는가?
- RQ32D 벤치마크와 비교했을 때 3D에서의 항력 감소 성능은 어떠하며, 와이크 역학이 정책 전략에 어떤 영향을 주는가?
주요 결과
| Re | 2D 벤치마크 | W85 | N85 | N255 |
|---|---|---|---|---|
| 100 | 13.0 | 9.4 | 4.3 | 8.0 |
| 200 | 14.9 | 17.2 | 11.1 | 12.7 |
| 300 | 21.9 | 6.7 | 10.8 | 15.3 |
| 400 | 5.6 | 9.9 | 15.1 | 11.1 |
- MARL은 Re = 100, 200, 300, 400에서 Ljet/D = 1일 때 각각 9.4%, 17.2%, 6.7%, 9.9%의 항력 감소를 달성하는 등 3D 실린더 케이스에서 상당한 항력 감소를 달성한다.
- 더 짧은 제트(Ljet/D = 0.4)에서 로컬 관찰의 경우 항력 감소가 4.3%, 11.0%, 10.8%, 15.0%이고, 이웃이 관찰될 때는 8.0%, 12.7%, 15.2%, 11.0%이다.
- 3D 결과는 2D 대응 대비 더 높은 Re에서의 항력 감소 성능이 더 일관되게 나타나며, 일부 Re 의존적 변동이 있음에도 불구하고 이를 보인다.
- DRL 제어는 와류 shedding 강도를 약화시키고 와이크 재접합을 지연시켜 작용으로 인한 와이크 안정화 효과를 나타낸다.
- 정책은 스팬에 걸친 추출된, 동기화된 제트 전략을 보이며, 더 높은 Re에서 제트 길이와 관찰 정밀도를 달리하면 이점이 있을 수 있다.
- MARL 프레임워크는 가중치를 공유하는 의사-환경에서 학습을 가속화하고 다른 실린더 기하에 대한 전이 가능성을 제공한다.
더 나은 연구,지금 바로 시작하세요
연구 설계부터 논문 작성까지, 연구 시간을 획기적으로 줄여보세요.
카드 등록 없음 · 무료 플랜 제공
이 리뷰는 AI가 만들고, 인간 에디터가 검토했습니다.