[논문 리뷰] Aerostack2: A Software Framework for Developing Multi-robot Aerial Systems
Aerostack2는 ROS 2 기반의 오픈 소스, 플랫폼 독립 프레임워크로 모듈식으로 다중 로봇 항공 시스템을 논리적 임무 명세, 재사용 가능한 구성요소, 군집화 기능과 함께 시뮬레이션 및 실제 비행에서 검증되었습니다.
The development of autonomous aerial systems, particularly for multi-robot configurations, is a complex challenge requiring multidisciplinary expertise. Unlike ground robotics, aerial robotics has seen limited standardization, leading to fragmented development efforts. To address this gap, we introduce Aerostack2, a comprehensive, open-source ROS 2 based framework designed for creating versatile and robust multi-robot aerial systems. Aerostack2 features platform independence, a modular plugin architecture, and behavior-based mission control, enabling easy customization and integration across various platforms. In this paper, we detail the full architecture of Aerostack2, which has been tested with several platforms in both simulation and real flights. We demonstrate its effectiveness through multiple validation scenarios, highlighting its potential to accelerate innovation and enhance collaboration in the aerial robotics community.
연구 동기 및 목표
- 표준적이고 협업 가능한 프레임워크를 제공하여 항공 로봇 소프트웨어의 분절화를 해결합니다.
- ROS 2를 기반으로 한 모듈식이고 플랫폼 독립적인 자율 항공 작업 환경을 제공합니다.
- 전체 제어 아키텍처 개발 속도를 높이기 위해 재사용 가능한 구성요소와 하위 시스템을 가능하게 합니다.
- 공통 데이터 채널과 인터페이스를 통해 다중 로봇 무리와 이종 플랫폼을 지원합니다.
- 오픈 소스 도구를 통한 시뮬레이션-실제 이전 및 커뮤니티 중심 개발을 촉진합니다.
제안 방법
- Aerostack2를 Aerostack의 진화로 제안하며, ROS 2 기반의 모듈식 다중 로봇 지향 아키텍처로 구축됩니다.
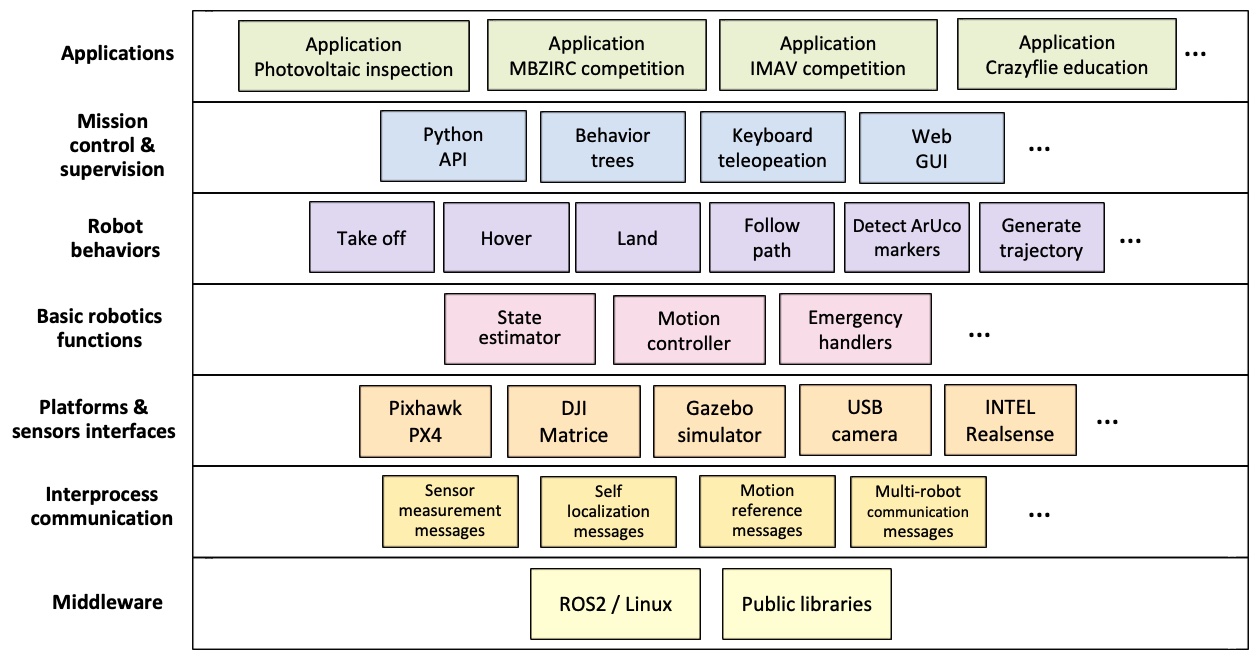
- 미들웨어, 프로세스 간 통신, 플랫폼/센서 인터페이스, 기본 로봇 기능, 동작, 임무 제어, 응용 프로그램의 계층으로 이루어진 계층적 소프트웨어 스택을 정의합니다.
- ROS 2 주제/서비스/액션 및 플랫폼 독립적 데이터 표현을 갖춘 표준 프로세스 간 데이터 채널을 구현합니다.
- 이동 제어 및 상태 추정과 같은 기본 로봇 기능을 매니저와 플러그인 선택기가 선택하는 확장 가능한 플러그인으로 설계합니다.
- 실행 모니터링과 ROS 2 액션 기반 인터페이스를 갖춘 이륙, 호버, 궤적 추종 등 기술을 캡슐화하는 전문 행동 구성요소를 사용합니다.
- 임무 명세 도구(Python API 및 행동 트리)와 임무 계획, 모니터링, 감독을 위한 웹 기반 GUI를 제공합니다.
실험 결과
연구 질문
- RQ1연구 그룹 간 재사용과 협업을 가능하게 하도록 항공 로봇 소프트웨어를 어떻게 표준화할 수 있을까요?
- RQ2ROS 2 기반의 모듈식 다중 로봇 프레임워크가 이종 드론 플랫폼과 시뮬레이션을 지원하면서도 플러그인 확장성을 유지할 수 있을까요?
- RQ3항공 시스템에서 신뢰할 수 있는 임무 명세, 실행 모니터링, 군집 조정을 가능하게 하는 메커니즘은 무엇일까요?
- RQ4다른 플랫폼과 센서 간의 시뮬레이션과 실제 배치를 Aerostack2가 얼마나 효과적으로 연결할 수 있을까요?
주요 결과
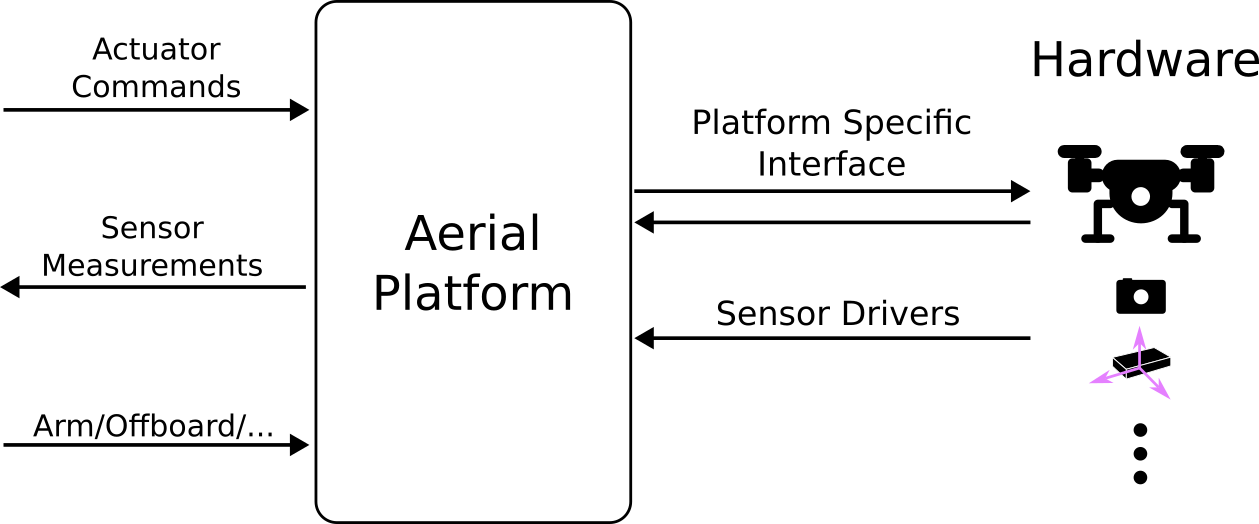
- Aerostack2는 여러 드론 플랫폼(예: Pixhawk, DJI)에서 플랫폼 독립성과 모듈화를 입증합니다.
- 프레임워크는 비행 제어에서 로컬라이제이션, 계획, 드론 간 통신에 이르는 다양한 기능을 지원합니다.
- 논리적 임무 계층(행동)이 로우 레벨 ROS 2 프로그래밍에 비해 임무 명세를 단순화합니다.
- Python API와 행동 트리의 통합은 유연한 임무 계획 및 모니터링 도구를 제공합니다.
- 실험에서 게이트 횡단 과제에서 최소한의 변화로 시뮬레이션-실제 이전이 가능함을 보였습니다(플랫폼 및 상태 추정 플러그인).
- 다른 플랫폼(Pixhawk F450 및 DJI M210 등)을 사용하는 이종 무리가 시연되었으며 다중 플랫폼 군집 제어 기능이 검증되었습니다.
더 나은 연구,지금 바로 시작하세요
연구 설계부터 논문 작성까지, 연구 시간을 획기적으로 줄여보세요.
카드 등록 없음 · 무료 플랜 제공
이 리뷰는 AI가 만들고, 인간 에디터가 검토했습니다.