[논문 리뷰] Continuous-time Trajectory Estimation: A Comparative Study Between Gaussian Process and Spline-based Approaches
본 논문은 가우시안 프로세스(GP)와 스플라인 기반 연속시간 궤적 추정치를 직접 비교하여, 모델과 스플라인 차수(pr order)가 서로 맞춰질 때 선형 및 SE(3) 시나리오에서 유사한 정확도와 비슷한 해결 시간(solve times)을 보임을 보여준다.
Continuous-time trajectory estimation is an attractive alternative to discrete-time batch estimation due to the ability to incorporate high-frequency measurements from asynchronous sensors while keeping the number of optimization parameters bounded. Two types of continuous-time estimation have become prevalent in the literature: Gaussian process regression and spline-based estimation. In this paper, we present a direct comparison between these two methods. We first compare them using a simple linear system, and then compare them in a camera and IMU sensor fusion scenario on SE(3) in both simulation and hardware. Our results show that if the same measurements and motion model are used, the two methods achieve similar trajectory accuracy. In addition, if the spline order is chosen so that the degree-of-differentiability of the two trajectory representations match, then they achieve similar solve times as well.
연구 동기 및 목표
- 이산 시간 배치 추정의 대안으로 연속시간 궤적 추정을 동기 부여하고 형식화한다.
- GP 기반과 스플라인 기반 표현 모두에 작동하는 일반화된 운동 사전(motion priors)을 개발한다.
- 시뮬레이션 데이터와 하드웨어 데이터를 모두 사용하여 선형 및 SE(3) 시나리오에서 GP와 스플라인 접근법 간의 공정한 비교를 제공한다.
- GP 운동 사전을 스플라인 기반 추정에 적용 가능하도록 확장하여 동등 비교 평가를 가능하게 한다.
제안 방법
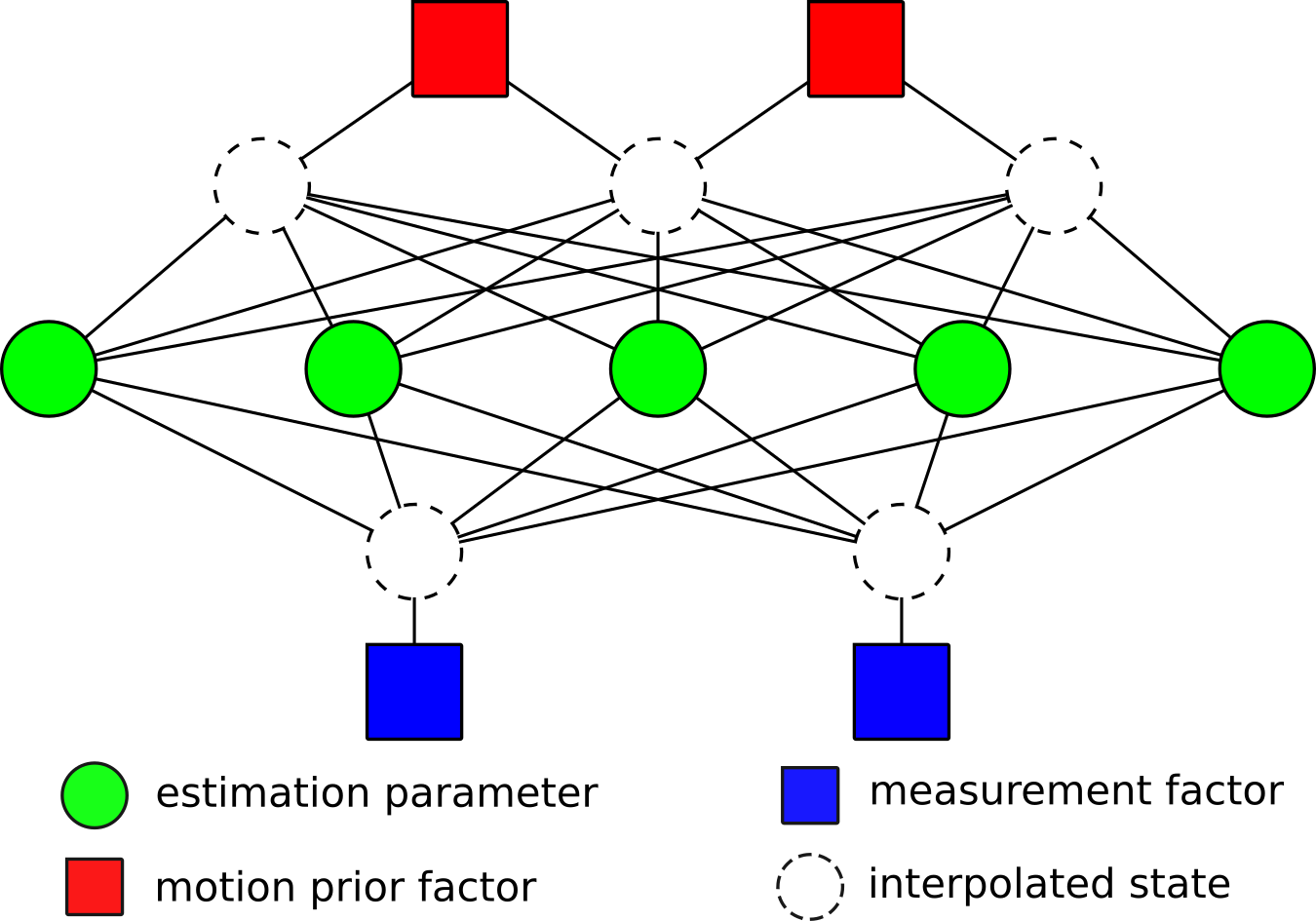
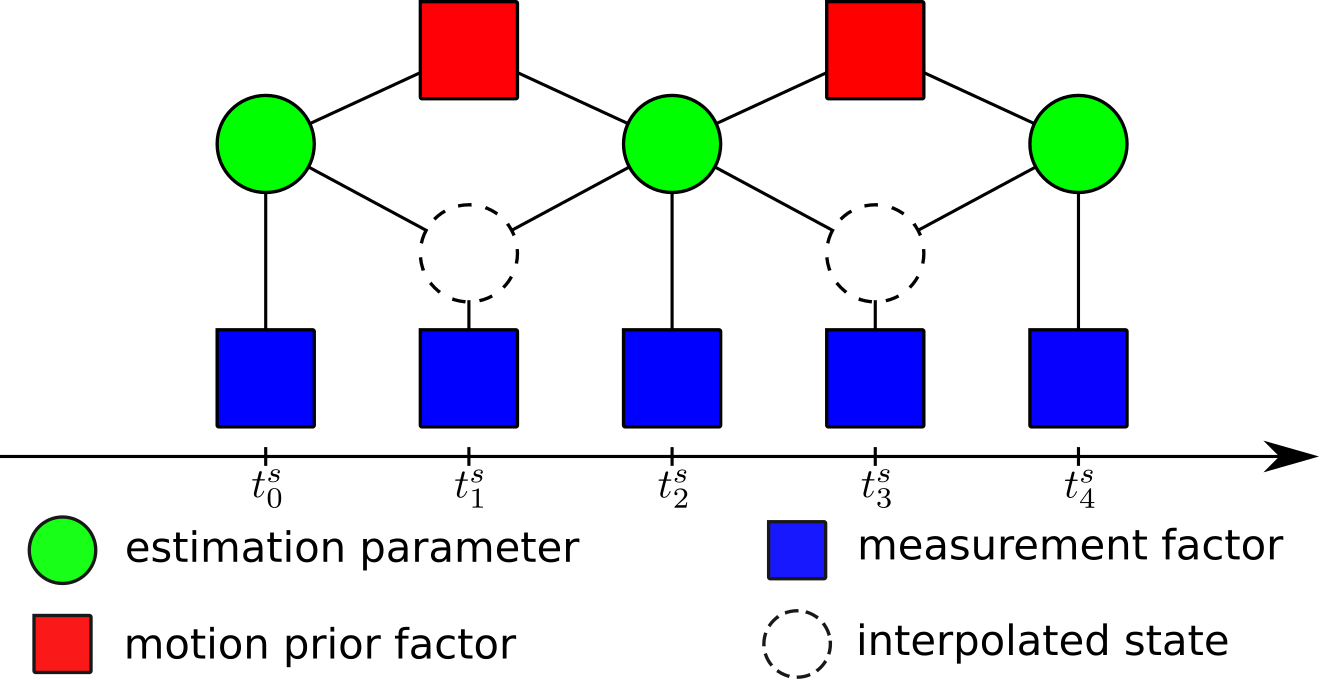
- 추정 매개변수와 상태 보간 함수를 사용하여 궤적을 표현하고 매개변수를 시간에 따라 상태로 매핑한다.
- 선형 시스템 및 Lie 군(SE(3)) 설정에 대한 운동 사전 일반화를 수행하며, WNOJ/WNOA 모델 및 그들의 Lie 대수 표현을 포함한다.
- 선형 시스템 및 Lie 군에 대한 GP 보간 공식 도출(식 (19)-(21) 및 (22)-(24) 포함).
- 벡터 공간 및 Lie 군 위의 스플라인 표현 도출, 누적 형태 및 SE(3)에 대한 군-곱 구성을 포함(식 (27)-(32)).
- 측정 잔차 및 운동 사전 항을 포함한 비선형 최소제곱 문제로 추정을 형식화한다(식 (5)).
- 두 가지 시나리오(선형 WNOJ 시스템과 SE(3)에서의 카메라-IMU 융합)를 통해 GP 기반 추정과 스플라인 기반 추정을 비교하며, 시뮬레이션 데이터와 하드웨어 데이터를 사용한다.
실험 결과
연구 질문
- RQ1동일한 측정치와 운동 모델을 사용할 때 GP 기반과 스플라인 기반 연속시간 궤적 추정이 비슷한 궤적 정확도를 보이나요?
- RQ2일치하는 스플라인 차수는 SE(3) 시나리오에서 GP와 스플라인 표현 간의 해결 시간 비슷하게 이끌까요?
- RQ3비동기식/고주파 측정에서 선형 및 SE(3) 센서 융합 문제에서 GP와 스플라인 추정기가 어떻게 비교되나요?
주요 결과
- 동일한 측정치와 운동 모델을 사용할 때 GP와 스플라인 방법은 비슷한 궤적 정확도를 달성한다.
- 스플라인 차수를 GP 표현의 미분가능도와 일치하도록 선택하면 두 방법의 해결 시간은 유사하다.
- 본 연구는 선형 및 SE(3) 케이스를 모두 다루고 시뮬레이션 데이터와 하드웨어 데이터를 통해 연구 결과를 검증한다.
- 운동 사전은 GP와 스플라인 표현을 동시에 사용할 수 있도록 일반화될 수 있어 공정한 비교가 가능하다.
더 나은 연구,지금 바로 시작하세요
연구 설계부터 논문 작성까지, 연구 시간을 획기적으로 줄여보세요.
카드 등록 없음 · 무료 플랜 제공
이 리뷰는 AI가 만들고, 인간 에디터가 검토했습니다.