[논문 리뷰] Perceptive Locomotion through Whole-Body MPC and Optimal Region Selection
이 논문은 표면 선택을 전신 MPC와 분리하는 지각적 보행 프레임워크를 제시하여 온라인 재계획을 50–100 Hz로 가능하게 하고 지각 오류 및 미끄러짐에 대한 견고성을 향상시킨다.
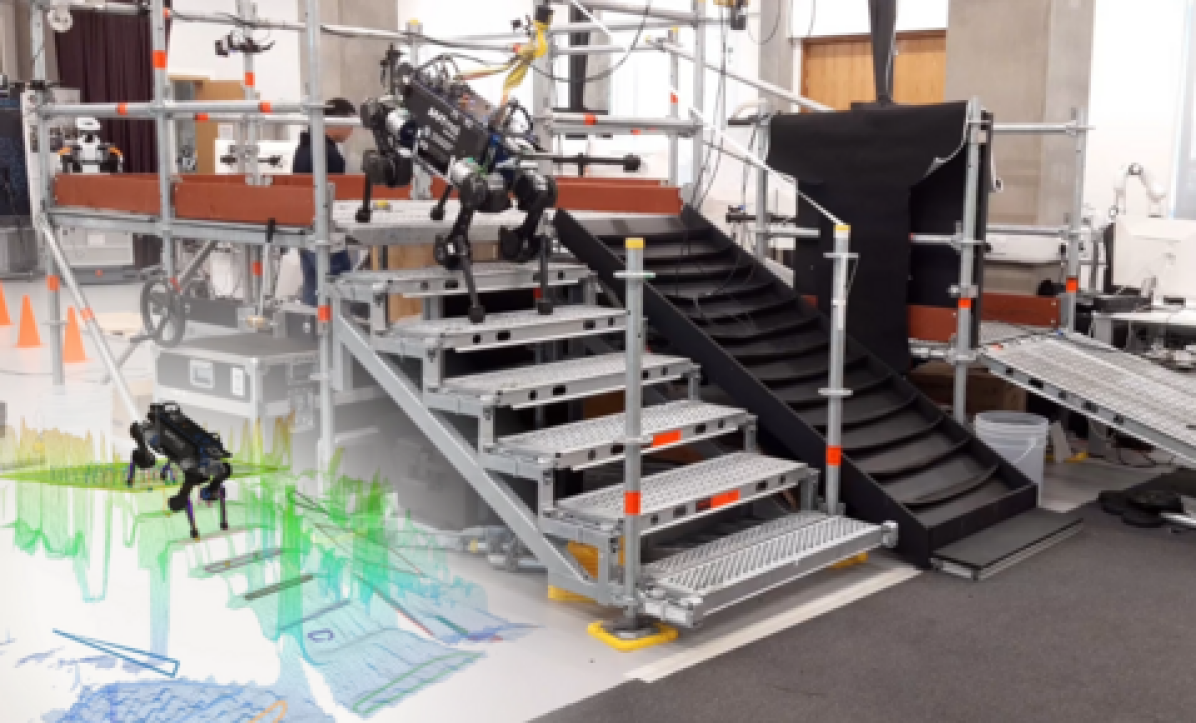
Real-time synthesis of legged locomotion maneuvers in challenging industrial settings is still an open problem, requiring simultaneous determination of footsteps locations several steps ahead while generating whole-body motions close to the robot's limits. State estimation and perception errors impose the practical constraint of fast re-planning motions in a model predictive control (MPC) framework. We first observe that the computational limitation of perceptive locomotion pipelines lies in the combinatorics of contact surface selection. Re-planning contact locations on selected surfaces can be accomplished at MPC frequencies (50-100 Hz). Then, whole-body motion generation typically follows a reference trajectory for the robot base to facilitate convergence. We propose removing this constraint to robustly address unforeseen events such as contact slipping, by leveraging a state-of-the-art whole-body MPC (Croccodyl). Our contributions are integrated into a complete framework for perceptive locomotion, validated under diverse terrain conditions, and demonstrated in challenging trials that push the robot's actuation limits, as well as in the ICRA 2023 quadruped challenge simulation.
연구 동기 및 목표
- 불확실한 산업 환경에서 실시간이고 강건한 다족 보행 로보틱스를 실현하려는 동기를 제시한다.
- 접촉 계획을 전신 제어와 분리하여 빠른 온라인 재계획을 가능하게 한다.
- 지형 인식, 볼록 표면 분할, 표면 선택을 WB-MPC와 통합한다.
- 도전적인 지형과 ICRA 2023 쿼드루펫 시뮬레이션에서 이 접근법을 시연한다.
제안 방법
- 접촉 계획을 전신 MPC와 분리하면서 접촉 위치를 MPC 출력과 동기화하여 50 Hz로 업데이트한다.
- 다음 단계(6–8 스텝 수평선)를 위한 볼록 접촉 표면을 선택하기 위해 표면 선택 MIP를 사용한다.
- 지형 고도 맵에서 추출한 볼록 평면의 합집합으로 표면을 표현하고 여유 공간과 볼록 분해로 이를 다듬는다.
- Bezier-궤적 기반 발 궤적 생성과 충돌 없는 QP를 사용해 온라인으로 발 배치를 조정한다.
- IMU, 바퀴 주행계, LIDAR 보정, 및 깊이 카메라를 포함하는 상태 추정기를 통합하여 약 1 Hz의 고도 맵을 구축한다.
- 토크 한계 하에서 WB-MPC와 함께 리카티 이득 제어기를 사용하여 동작을 합성한다.
실험 결과
연구 질문
- RQ1WB-MPC에서 표면 선택을 분리하면 실행 가능성을 해치지 않으면서 더 높은 주기의 재계획이 가능할까?
- RQ2온라인 표면 선택을 3–5 Hz로 하고 MPC를 50 Hz로 수행할 때 지각 오류 및 접촉 미끄러짐에 대한 강인성은 어떻게 달라지는가?
- RQ3도전적인 지형에서 신뢰할 수 있는 발걸음 배치를 위해 볼록 표면 처리와 여유 공간이 어떤 역할을 하는가?
- RQ4WB-MPC 피드백을 도입하는 것이 축소된 다이내믹스 접근법과 비교하여 지각 보행 성능을 향상시키는가?
주요 결과
- 50 Hz로 업데이트되는 표면 재배치 모듈은 지각 오류와 미끄러짐에 대한 견고성을 제공한다.
- 3–5 Hz의 표면 플래너가 다가오는 다수의 스텝에 대해 실행 가능한 볼록 표면을 효과적으로 선택한다.
- 전체 프레임워크는 도전적인 지형에서의 최첨단 보행 성능과 ICRA 2023 시뮬레이션에서의 성능을 보여준다.
- 볼록 분해 및 안전 여유 공간은 계획 복잡성을 줄이고 발 배치의 안전성을 향상시킨다.
- 토크 한계와 엔드 이펙터 추적을 갖춘 WB-MPC가 기저선 접근법에 비해 교란 저항을 향상시킨다.

더 나은 연구,지금 바로 시작하세요
연구 설계부터 논문 작성까지, 연구 시간을 획기적으로 줄여보세요.
카드 등록 없음 · 무료 플랜 제공
이 리뷰는 AI가 만들고, 인간 에디터가 검토했습니다.