[논문 리뷰] Text2Motion: From Natural Language Instructions to Feasible Plans
Text2Motion은 대형 언어 모델 계획과 학습된 기술 라이브러리 및 기하학적 타당성 플래너를 결합하여 다단계의 장기적 조작 계획을 생성하고 검증합니다. 이는 challenging tasks에서 82%의 성공률을 달성하며, 이전의 언어 기반 플래너보다 우수한 13%를 기록합니다.
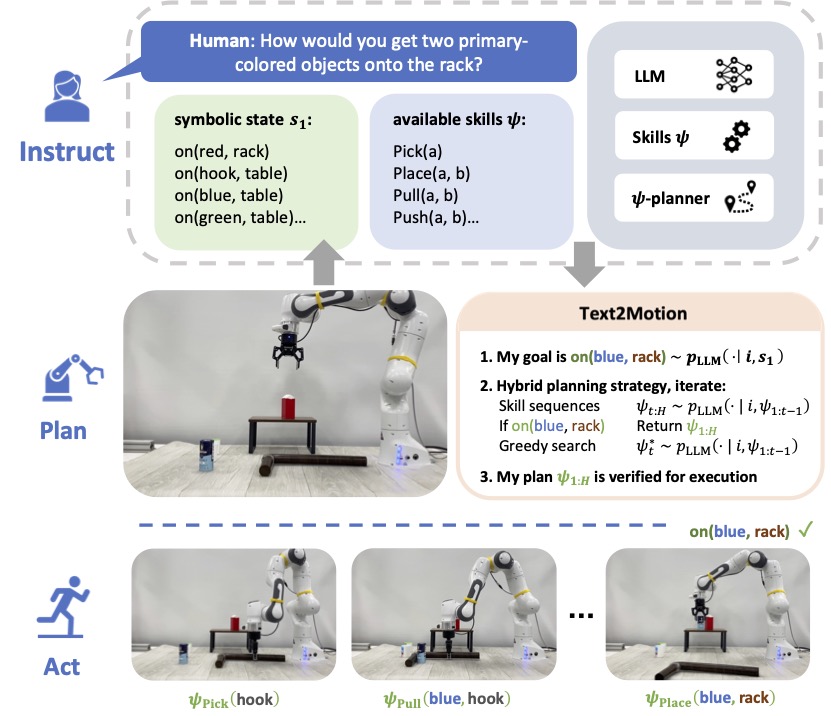
We propose Text2Motion, a language-based planning framework enabling robots to solve sequential manipulation tasks that require long-horizon reasoning. Given a natural language instruction, our framework constructs both a task- and motion-level plan that is verified to reach inferred symbolic goals. Text2Motion uses feasibility heuristics encoded in Q-functions of a library of skills to guide task planning with Large Language Models. Whereas previous language-based planners only consider the feasibility of individual skills, Text2Motion actively resolves geometric dependencies spanning skill sequences by performing geometric feasibility planning during its search. We evaluate our method on a suite of problems that require long-horizon reasoning, interpretation of abstract goals, and handling of partial affordance perception. Our experiments show that Text2Motion can solve these challenging problems with a success rate of 82%, while prior state-of-the-art language-based planning methods only achieve 13%. Text2Motion thus provides promising generalization characteristics to semantically diverse sequential manipulation tasks with geometric dependencies between skills.
연구 동기 및 목표
- 자연어 지시를 실행 가능한 상징적 및 기하학적 계획으로 변환해야 하는 장기 전 로봇 계획의 필요성 강조.
- 실행 전 계획의 타당성을 검증하기 위해 LLM과 조작 기술 라이브러리 및 기하학적 타당성 계획기를 통합.
- 언패지(task)들을 다루기 위해 Shooting 기반과 탐색 기반 계획의 하이브리드 전략 개발.
- 자연어 지시로부터 목표 상태를 추론하는 계획 종료 메커니즘을 제공하여 실행 전 완료를 검증합니다.
제안 방법
- 자연어 지시와 장면 설명으로부터 목표 제안 및 후보 기술 시퀀스를 생성하기 위해 LLM을 사용합니다.
- 각 기술을 매개변수화된 조작 원시와 타당성 평가에 대응하는 Q-함수를 가진 정책으로 표현합니다.
- 계획에 따른 각 기술의 성공 확률의 곱을 최대화하도록 기하학적 타당성 계획(STAP)을 적용합니다(Eq. 4–5).
- 촬영 기반 후보 전체 기술 시퀀스를 생성하고 타당성 점수로 최적을 선택하는 Shooting 기반 플래너를 구현합니다(Algorithm 1).
- 다음 기술을 LLM의 유용성과 기하학적 타당성을 결합하여 점진적으로 선택하는 탐색 기반 플래너를 구현하고 가능한 경우 Shooting을 인터리브합니다(Eq. 8–12).
- 실행 전 기하학적으로 타당한 계획을 찾기 위해 Shooting과 Greedy-step 계획을 번갈아 수행하는 하이브리드 Text2Motion 알고리즘을 제안합니다(Algorithm 3).
- 유효하지 않은 OOD 기술을 거부하기 위해 Q-value 앙상블 분산 기반의 out-of-distribution 탐지기를 포함합니다(Eq. 13).
실험 결과
연구 질문
- RQ1장기 로봇 조작에 대해 LLM이 생성한 계획의 정당성과 타당성을 어떻게 검증할 수 있는가?
- RQ2기하학적 타당성 계획을 LLM과 통합하면 기하학적 의존성이 있는 작업에서 성공률이 향상되는가?
- RQ3촬영-탐색 하이브리드 플래닝 전략은 부분적 어포던스 인지에 대한 근시적 언어 기반 플래너 대비 어떤 강점이 있는가?
- RQ4사전 목표 예측이 실행 전 계획 종료를 신뢰성 있게 보장할 수 있는가?
- RQ5학습된 다이나믹스와 Q-함수를 가진 기술 라이브러리에 계획을 바인딩하는 것의 이점과 한계는 무엇인가?
주요 결과
- Text2Motion은 장기 상호작용 가능한 탁자 위 조작 과제 군에서 82%의 성공률을 달성합니다.
- 동일 평가에서 이전의 최첨단 언어 기반 계획 방법은 약 13%를 달성합니다.
- 다중 단계에 걸친 의존성을 다루려면 기술 시퀀스에 대한 기하학적 타당성 계획이 필수적입니다.
- 촬영-탐색을 결합한 하이브리드 플래너가 기하학적 의존성이 있는 과제에서 순수한 근시적 또는 순수한 계획 기반 기법보다 우수합니다.
- 사전 목표 예측은 실행 전 계획 종료를 신뢰할 수 있게 제공합니다.

더 나은 연구,지금 바로 시작하세요
연구 설계부터 논문 작성까지, 연구 시간을 획기적으로 줄여보세요.
카드 등록 없음 · 무료 플랜 제공
이 리뷰는 AI가 만들고, 인간 에디터가 검토했습니다.