[논문 리뷰] The Vector Grounding Problem
본 논문은 다섯 가지 접지(grounding) 개념을 구분하고, 참조적 접지가 벡터 접지 문제의 기초가 됨을 주장하며, RLHF로 작동하는 LLM이 다중모달리티나 구현 없이도 의미를 접지할 수 있다고 주장한다.
Large language models (LLMs) produce seemingly meaningful outputs, yet they are trained on text alone without direct interaction with the world. This leads to a modern variant of the classical symbol grounding problem in AI: can LLMs' internal states and outputs be about extra-linguistic reality, independently of the meaning human interpreters project onto them? We argue that they can. We first distinguish referential grounding -- the connection between a representation and its worldly referent -- from other forms of grounding and argue it is the only kind essential to solving the problem. We contend that referential grounding is achieved when a system's internal states satisfy two conditions derived from teleosemantic theories of representation: (1) they stand in appropriate causal-informational relations to the world, and (2) they have a history of selection that has endowed them with the function of carrying this information. We argue that LLMs can meet both conditions, even without multimodality or embodiment.
연구 동기 및 목표
- 생물학적 또는 인공 시스템에서 내부 표현이 어떻게 접지될 수 있는지 차이를 보인다.
- 다섯 가지 접지 개념을 식별하고 벡터 접지 문제의 중심이 되는 개념을 명확히 한다.
- RLHF-가 적용된 LLM이 세계와의 인과적-역사적 관계를 갖고 있어 접지에 필요한 조건을 충족하는지 주장한다.
- 인공 시스템에서 참조적 접지가 다중모달리티나 구현이 필요하거나 충분한지 평가한다.
제안 방법
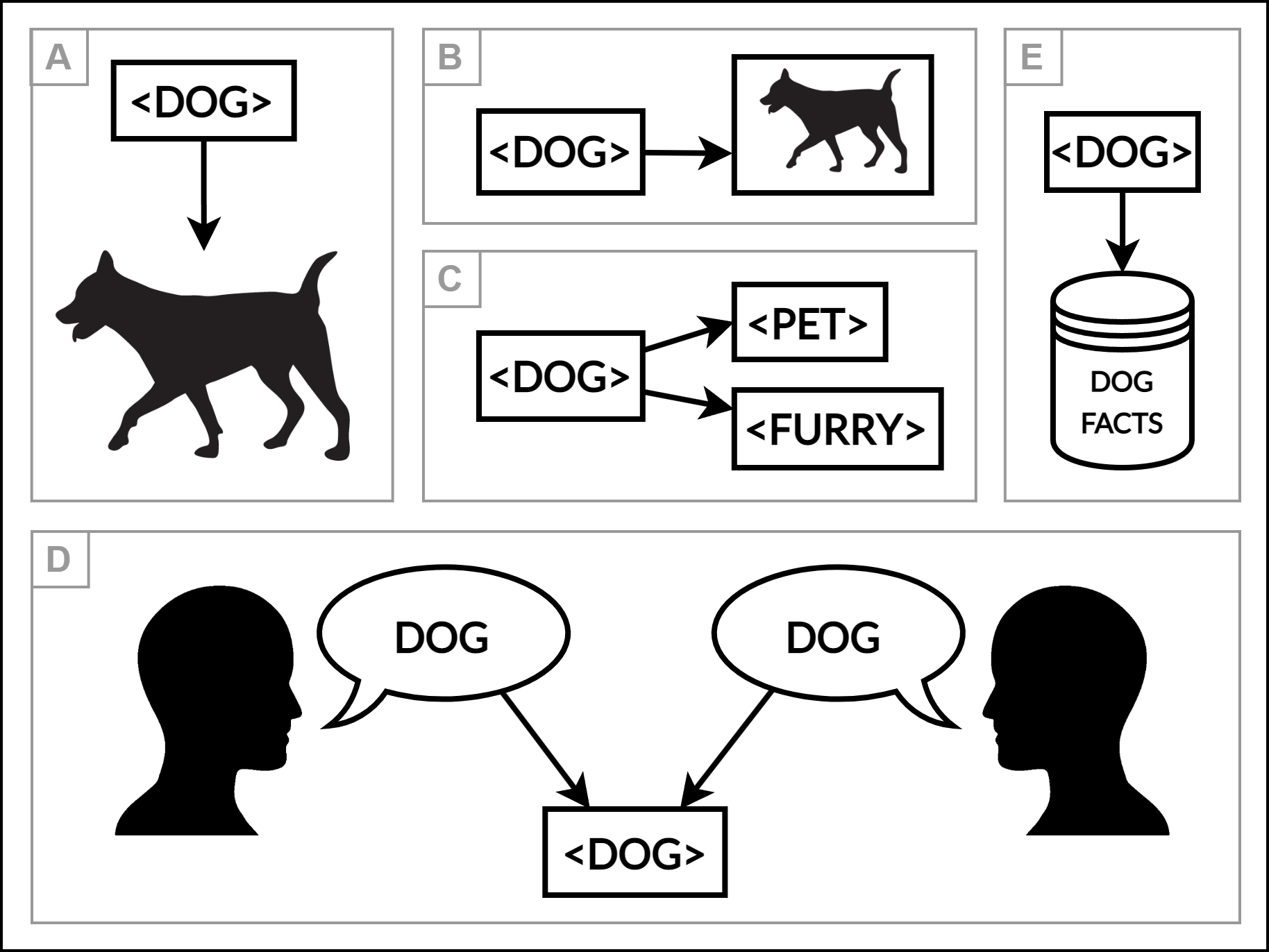
- 다섯 가지 접지 개념을 조사하고 정의한다: 참조적, 센서모터, 관계적, 의사소통적, 인과적-역사적.
- 고전 AI의 기호 접지 문제를 설명하고 이를 LLM의 벡터 기반 설정에 번역한다.
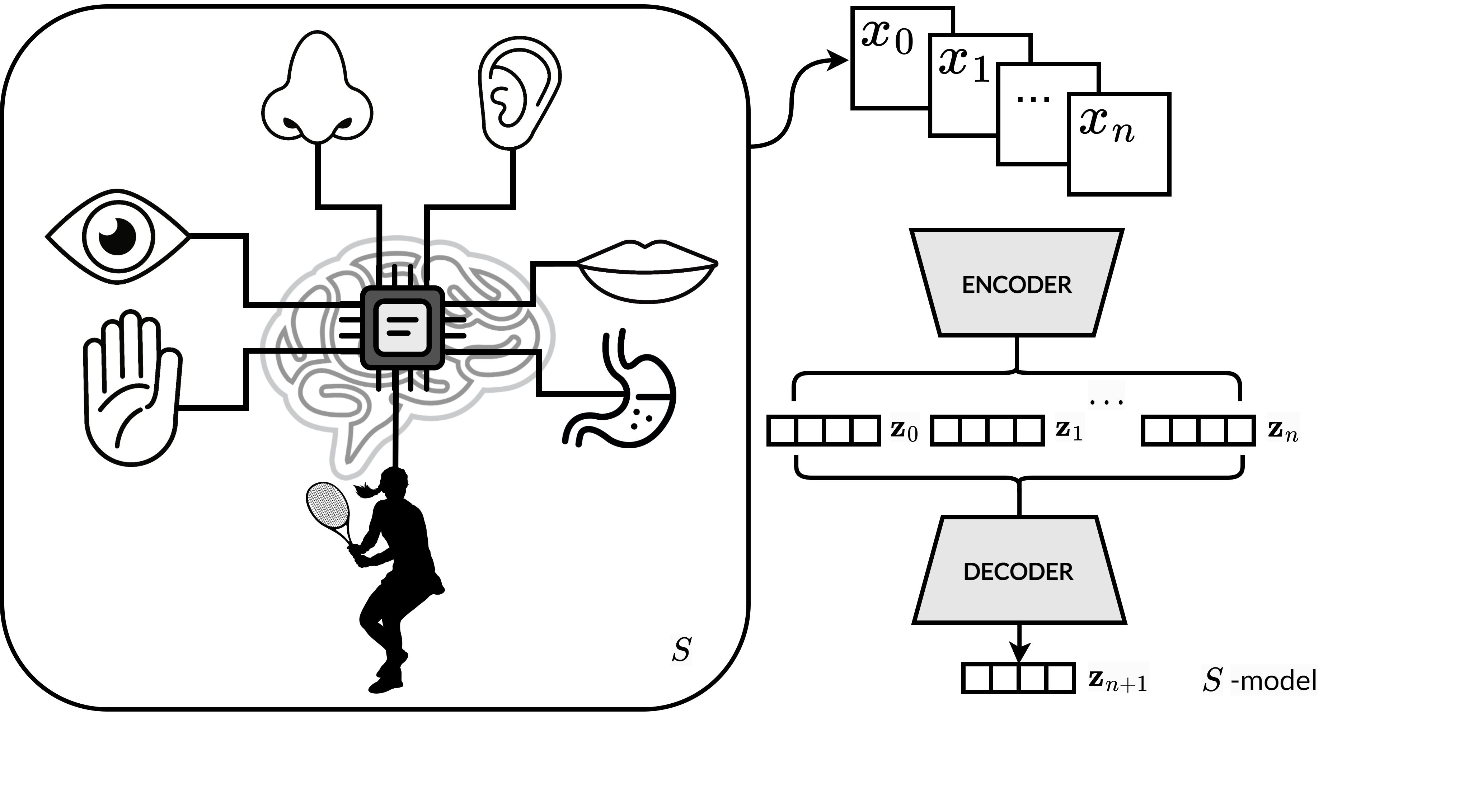
- LLMs의 접지 도전과제를 위한 직관적 모형으로 Octopus Test를 도입한다.
- 참조적 접지가 LLM의 접지에 필수적임을 논의하고 RLHF와 컨텍스트 학습이 어떻게 기여하는지 설명한다.
- 인공 시스템에서 다중모달리티와 구현이 접지에 필요하거나 충분한지 평가한다.
실험 결과
연구 질문
- RQ1다양한 접지 개념은 무엇이며, LLM의 내부 표현의 접지에서 어떤 것이 중심인가?
- RQ2특히 RLHF와 컨텍스트 학습을 통해 큰 사전학습 모델이 내재적 의미를 접지 메커니즘으로 성취할 수 있는가?
- RQ3참조적 접지를 인공 시스템에서 달성하려면 다중모달리티와 구현이 필요한가?
주요 결과
- LLMs는 기호 접지 문제의 벡터 기반 아날로그에 직면하므로 접지 고려가 필요하다.
- 참조적 접지가 LLM에서 접지의 중심 개념으로 확인되며, 내부 표현을 세계의 Referents와 연결한다.
- RLHF와 컨텍스트 학습은 세계와의 필요한 인과적-역사적 관계를 구축하는 기능을 제공하여 접지에 기여한다.
- 다중모달리티와 구현은 인공 시스템의 참조적 접지에 필요하거나 충분한 조건이 아니라고 주장된다.
- 논문은 접지된 내부 상태가 더 넓은 인지 능력에 중요할 수는 있지만, 이해나 행동 주체성에 단독으로 충분하지는 않다고 강조한다.
더 나은 연구,지금 바로 시작하세요
연구 설계부터 논문 작성까지, 연구 시간을 획기적으로 줄여보세요.
카드 등록 없음 · 무료 플랜 제공
이 리뷰는 AI가 만들고, 인간 에디터가 검토했습니다.