[논문 리뷰] Traj-LIO: A Resilient Multi-LiDAR Multi-IMU State Estimator Through Sparse Gaussian Process
Traj-LIO는 회전과 병진을 SO(3)와 벡터 공간으로 분리하여 IMU에 의존하지 않는 자가 주도형 상태 추정기이자 센서 장애에 강인한 연속시간 GP 기반 다중 LiDAR 및 다중 IMU 상태 추정기입니다.
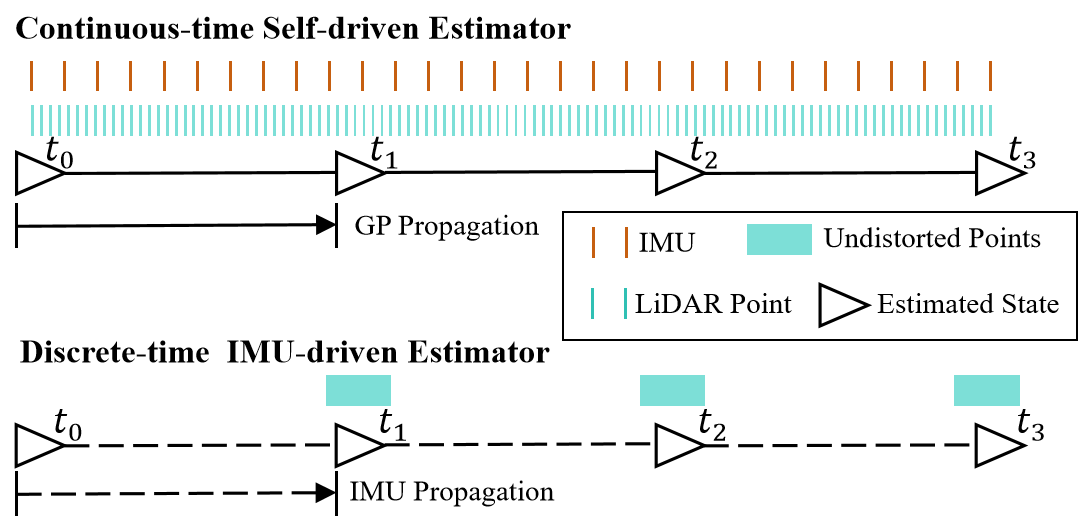
Nowadays, sensor suits have been equipped with redundant LiDARs and IMUs to mitigate the risks associated with sensor failure. It is challenging for the previous discrete-time and IMU-driven kinematic systems to incorporate multiple asynchronized sensors, which are susceptible to abnormal IMU data. To address these limitations, we introduce a multi-LiDAR multi-IMU state estimator by taking advantage of Gaussian Process (GP) that predicts a non-parametric continuous-time trajectory to capture sensors' spatial-temporal movement with limited control states. Since the kinematic model driven by three types of linear time-invariant stochastic differential equations are independent of external sensor measurements, our proposed approach is capable of handling different sensor configurations and resilient to sensor failures. Moreover, we replace the conventional $\mathrm{SE}(3)$ state representation with the combination of $\mathrm{SO}(3)$ and vector space, which enables GP-based LiDAR-inertial system to fulfill the real-time requirement. Extensive experiments on the public datasets demonstrate the versatility and resilience of our proposed multi-LiDAR multi-IMU state estimator. To contribute to the community, we will make our source code publicly available.
연구 동기 및 목표
- 잠재적 센서 장애 속에서 중복적이고 비동기화된 LiDAR와 IMU를 사용할 때 견고한 상태 추정을 촉진한다.
- 고정된 이산 시간 파이프라인에 의존하지 않고 여러 센서를 융합하기 위한 연속시간 GP 기반 프레임워크를 개발한다.
- LiDAR-관심(관성) 측정에서 회전과 병진을 분리하여 야 analytic Jacobians 및 실시간 성능을 가능하게 한다.
- IMU 데이터에 의존하지 않는 GP 사전에 구동되는 자가 주도형 운동 모델을 제공하여 회복력을 강화한다.
제안 방법
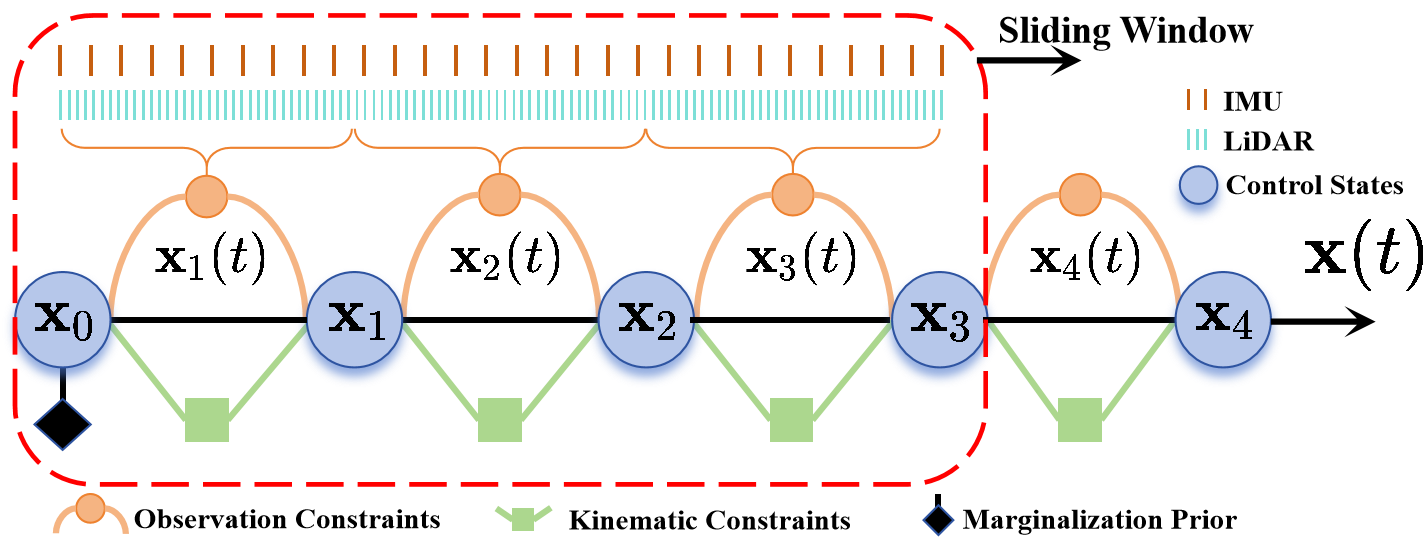
- 연구 구간에 걸친 Gaussian Process를 사용해 연속시간 상태 x(t)을 표현하여 임의의 타임스탬프에서 보간을 통해 조회 가능하게 한다.
- 벡터 공간에 세 개의 GP 사전(Random Walk, Constant Velocity, Constant Acceleration)과 SO(3)에서의 매니폴드 인식 GP를 사용해 회전을 모델링한다.
- 회전(SO(3))을 병진(벡터 공간)과 분리해 야코비안을 단순화하고 IMU 측정치를 통합한다.
- IMU 입력에 의존하지 않는 희소 GP 사전에 의해 구동되는 자가 주도형 운동 모델을 채택한다.
- 상태 추정을 부분 LTISDE와 해석적 야코비안을 갖는 희소 GP 회귀로 실시간 성능을 위해 공식화한다.
- 과거 상태를 마지날라이즈하고 센서 측정치를 타임스탬프에서 보간하는 연속시간 슬라이딩 윈도우 최적화를 사용한다.
실험 결과
연구 질문
- RQ1연속시간 프레임워크에서 동기화된 센서 측정 없이 다중 LiDAR 다중 IMU 시스템을 융합할 수 있는가?
- RQ2GP 기반 자가 주도형 운동 모델이 일부 IMU나 LiDAR가 고장나거나 저품질 데이터를 제공할 때도 정확도와 회복력을 유지할 수 있는가?
- RQ3회전과 병진을 분리하는 것이 계산 효율성을 향상시키고 GP 기반 LiDAR-관성 오도ometry를 실시간으로 가능하게 하는가?
- RQ4제안된 방법이 다양한 센서 구성에서 어느 정도까지 작동하고 공개 데이터셋에서 경쟁력 있는 정확도를 달성하는가?
주요 결과
- 이 접근법은 GP 기반의 자가 주도형 운동 모델 내에서 모든 센서 입력을 측정으로 간주함으로써 센서 장애에 대한 회복력을 달성한다.
- 회전(SO(3))을 병진으로부터 분리하면 해석적 야코비안을 가능하게 하고 GP 기반 추정에서 실시간 성능을 지원한다.
- 다중 LiDAR와 다중 IMU를 포함한 유연한 센서 구성을 연속시간 궤적 표현으로 지원한다.
- GP 사전 내의 보간은 임의의 타임스탬프에서 상태를 조회할 수 있게 하여 밀집 이산 상태의 필요성을 줄인다.
- 휴대용에서 공격적 UAV 데이터 세트까지 경쟁력 있는 정확성을 보여주며 다재다능성을 입증한다.
더 나은 연구,지금 바로 시작하세요
연구 설계부터 논문 작성까지, 연구 시간을 획기적으로 줄여보세요.
카드 등록 없음 · 무료 플랜 제공
이 리뷰는 AI가 만들고, 인간 에디터가 검토했습니다.