[論文レビュー] Aerostack2: A Software Framework for Developing Multi-robot Aerial Systems
Aerostack2 は、ROS 2 ベースのオープンソースで、プラットフォームに依存しないフレームワークで、論理的な任務仕様、再利用可能なコンポーネント、群れ行動機能を持つマルチロボット空中システムをモジュール化してサポートし、シミュレーションと実機飛行で検証されています。
The development of autonomous aerial systems, particularly for multi-robot configurations, is a complex challenge requiring multidisciplinary expertise. Unlike ground robotics, aerial robotics has seen limited standardization, leading to fragmented development efforts. To address this gap, we introduce Aerostack2, a comprehensive, open-source ROS 2 based framework designed for creating versatile and robust multi-robot aerial systems. Aerostack2 features platform independence, a modular plugin architecture, and behavior-based mission control, enabling easy customization and integration across various platforms. In this paper, we detail the full architecture of Aerostack2, which has been tested with several platforms in both simulation and real flights. We demonstrate its effectiveness through multiple validation scenarios, highlighting its potential to accelerate innovation and enhance collaboration in the aerial robotics community.
研究の動機と目的
- 標準的で協調的なフレームワークを提供することにより、空中ロボティクスソフトウェアの断片化を解消する。
- ROS 2 上に構築されたモジュール式でプラットフォームに依存しない自動航行作業環境を提供する。
- 再利用可能なコンポーネントとサブシステムを有効にして、完全な制御アーキテクチャの開発を加速する。
- 共通データチャネルとインターフェースを通じて、マルチロボット群や異種プラットフォームをサポートする。
- オープンソースツールを通じたシミュレーションから実機への移行と、コミュニティ主導の開発を促進する。
提案手法
- Aerostack2 を、ROS 2 上に構築されたモジュール式でマルチロボット志向のアーキテクチャを持つ Aerostack の進化として提案する。
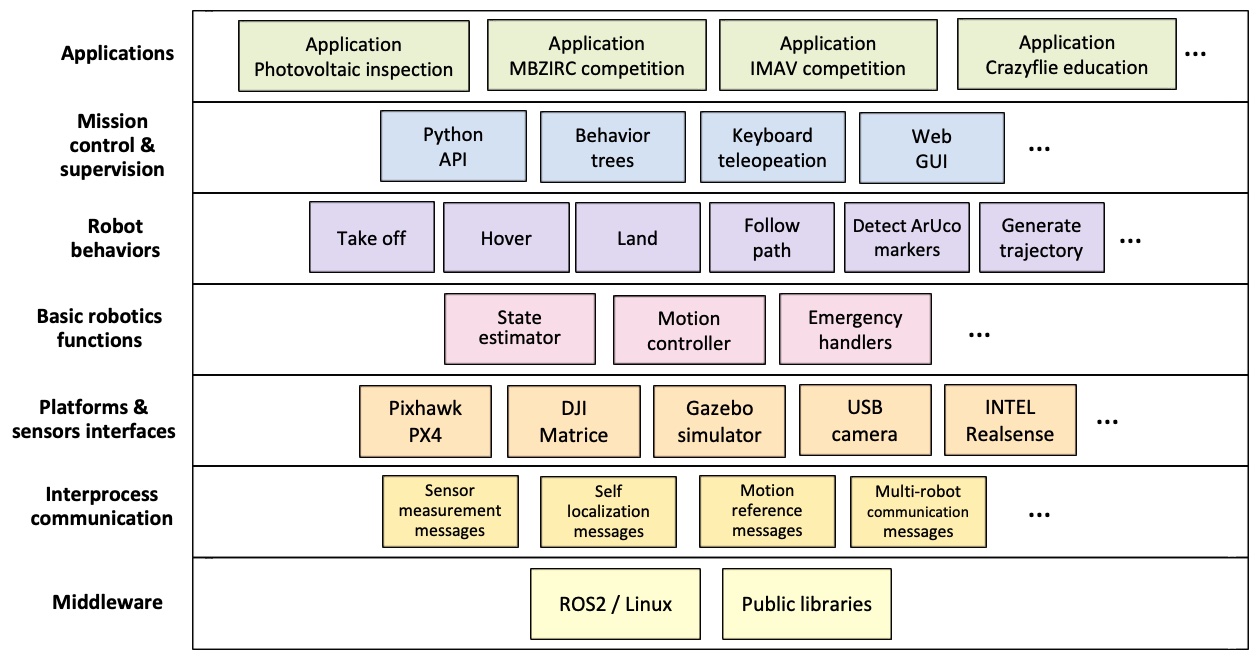
- ミドルウェア、プロセス間通信、プラットフォーム/センサインタフェース、基本的なロボット機能、挙動、ミッション制御、アプリケーションという層からなる階層的なソフトウェアスタックを定義する。
- ROS 2 トピック/サービス/アクションとプラットフォーム非依存データ表現を用いた標準のプロセス間データチャネルを実装する。
- 基本的なロボット機能(モーション制御と状態推定)を、マネージャとプラグインセレクターによって選択されるプラグインとして設計する。
- 特定のスキルをカプセル化する専門の挙動コンポーネントを使用し、実行監視とROS 2 アクションベースのインターフェースを備える(例:離陸、ホバー、軌道追従)。
- ミッション仕様ツール(Python API とビヘイビアツリー)と、ミッションの計画、監視、および監督のためのウェブベースの GUI を提供する。
実験結果
リサーチクエスチョン
- RQ1研究グループ間の再利用と協力を可能にするために、空中ロボティクスソフトウェアをどのように標準化できるか。
- RQ2ROS 2 上に構築されたモジュール式のマルチロボットフレームワークは、異種のドローンプラットフォームとシミュレーションを、プラグイン拡張性を維持しながらサポートできるか。
- RQ3空中システムにおける信頼性の高いミッション仕様、実行監視、群行動の協調を可能にする仕組みは何か。
- RQ4Aerostack2 は、異なるプラットフォームやセンサにまたがるシミュレーションと実機展開をどれだけ効果的に橋渡しできるか。
主な発見
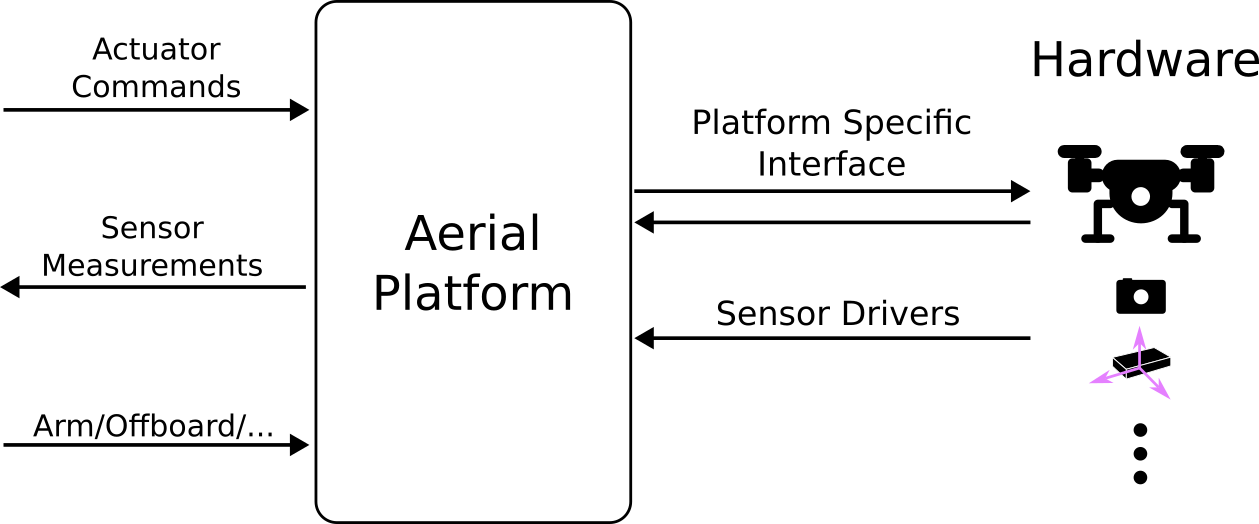
- Aerostack2 は、複数のドローン・プラットフォーム(例:Pixhawk、DJI)において、プラットフォーム独立性とモジュール性を示している。
- このフレームワークは、飛行制御から位置推定、計画、ドローン間通信に至る幅広い機能をサポートします。
- 論理的なミッション層(挙動)は、低レベルの ROS 2 プログラミングと比べてミッション仕様を容易にします。
- Python API とビヘイビアツリーの統合は、柔軟なミッション計画と監視ツールを提供します。
- 実験では、ゲート横断タスクにおいて最小の変更(プラットフォームと状態推定プラグイン)でシミュレータから実機への移行を示しています。
- 異種プラットフォーム(例:Pixhawk F450 と DJI M210)を用いたヘテロジニアス群衆のデモを行い、マルチプラットフォーム群行動機能を検証しました。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。