[論文レビュー] Barkour: Benchmarking Animal-level Agility with Quadruped Robots
tldr: Barkour introduces an obstacle-course benchmark for quadruped robots to quantify agility, with two baselines: specialist policies plus a high-level navigator and a transformer-based generalist policy trained via distillation, evaluated on a custom robot and real dogs.
Animals have evolved various agile locomotion strategies, such as sprinting, leaping, and jumping. There is a growing interest in developing legged robots that move like their biological counterparts and show various agile skills to navigate complex environments quickly. Despite the interest, the field lacks systematic benchmarks to measure the performance of control policies and hardware in agility. We introduce the Barkour benchmark, an obstacle course to quantify agility for legged robots. Inspired by dog agility competitions, it consists of diverse obstacles and a time based scoring mechanism. This encourages researchers to develop controllers that not only move fast, but do so in a controllable and versatile way. To set strong baselines, we present two methods for tackling the benchmark. In the first approach, we train specialist locomotion skills using on-policy reinforcement learning methods and combine them with a high-level navigation controller. In the second approach, we distill the specialist skills into a Transformer-based generalist locomotion policy, named Locomotion-Transformer, that can handle various terrains and adjust the robot's gait based on the perceived environment and robot states. Using a custom-built quadruped robot, we demonstrate that our method can complete the course at half the speed of a dog. We hope that our work represents a step towards creating controllers that enable robots to reach animal-level agility.
研究の動機と目的
- Define Barkour as a standardized, extensible agility benchmark for quadruped robots inspired by dog agility competitions.
- Develop two baseline approaches to solve Barkour: (1) specialist policies orchestrated by a high-level controller, (2) a generalist Locomotion-Transformer learned by distilling specialist policies.
- Demonstrate sim-to-real transfer using domain randomization in a custom-built quadruped robot.
- Evaluate zero-shot transfer and compare robot performance to real dogs to assess agility gaps and benchmark usefulness.
提案手法
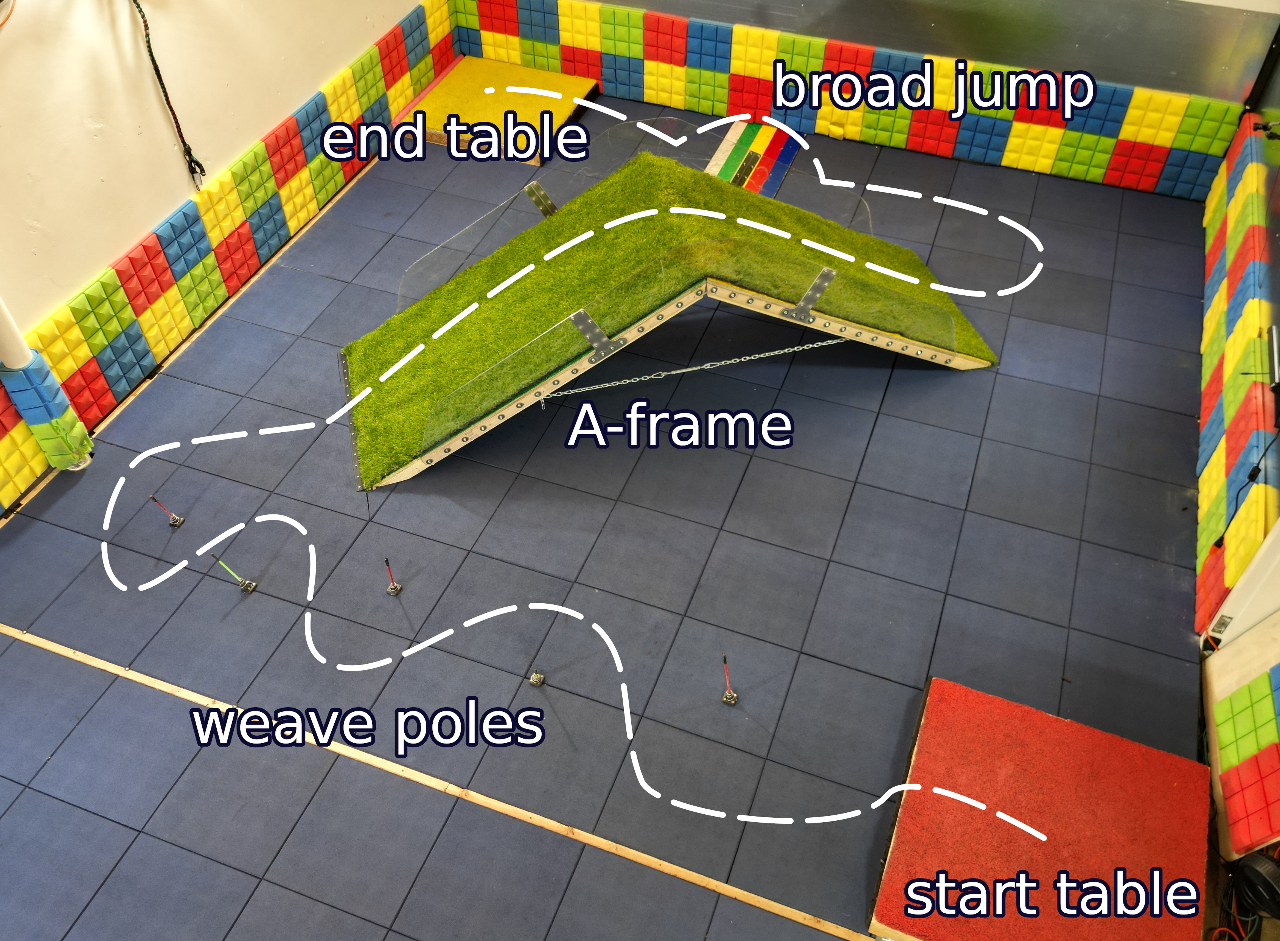
- Design Barkour as a 5m x 5m obstacle course with four obstacle types and a time-based agility score.
- Define a Barkour score with deductions for missed obstacles and overtime, using a target average speed to compute allotted time for each obstacle.
- Train three specialist policies in simulation for different tasks (omni-directional walking, slope climbing, jumping) using PPO in LeggedGym with domain randomization.
- Distill the specialist policies into a single generalist Locomotion-Transformer that predicts next actions from a sequence of proprioceptive states, velocity commands, and heightfield inputs.
- Implement a high-level navigation controller to switch between specialist policies, and compare with the Locomotion-Transformer plus a simplified navigation for obstacle traversal.
- Conduct real-world experiments on a custom small quadruped robot and perform zero-shot sim-to-real transfer tests.
実験結果
リサーチクエスチョン
- RQ1Can Barkour serve as a robust, standardized benchmark for measuring agility in quadruped locomotion controllers?
- RQ2How do specialist-policy-based and generalist-policy-based baselines compare on Barkour in terms of agility score, completion time, and forward velocity?
- RQ3What sim-to-real transfer improvements (via domain randomization) are needed to close the gap between simulation-trained controllers and hardware performance?
- RQ4How does the Locomotion-Transformer generalist policy perform relative to specialized controllers when faced with all Barkour obstacles?
- RQ5How does robot performance compare to real dogs on the Barkour course?
主な発見
| Policy Type | Barkour Score | Completion Time | Forward Velocity |
|---|---|---|---|
| 専門ポリシー | 0.77\pm 0.064 | 24.6\pm 1.1 s | 0.74\pm 0.04 m/s |
| Locomotion-Transformer | 0.73\pm 0.062 | 25.8\pm 1.6 s | 0.69\pm 0.04 m/s |
| 小型犬 | 1.00\pm 0 | 9.02\pm 0.65 s | — |
- Specialist policies complete the full Barkour course but with variable speeds, achieving an average Barkour score of 0.77 and average forward velocity of 0.74 m/s; completion time averages 24.6 s.
- Locomotion-Transformer, a generalist policy distilled from specialists, achieves a Barkour score of 0.73 with an average completion time of 25.8 s and forward velocity 0.69 m/s.
- Small dogs can reach the full score of 1.0 in about 9.02 s, outperforming the robotic baselines on the full course.
- Across 70 trials with specialists, the robot completed most runs, with 6 failures due to falls or tipping; 40 runs touched the jump board yet scored around 0.73 on average.
- Specialists achieve 100% success on weave poles and A-frame, but broad jump success is 38%; the generalist shows comparable performance to the specialists on some tasks.
- The study demonstrates a measurable sim-to-real transfer capability and highlights agility gaps between robot policies and animal benchmarks, guiding future improvements in hardware and control.

より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。