[論文レビュー] Communication and Control in Collaborative UAVs: Recent Advances and Future Trends
This paper provides a comprehensive survey of collaborative communication and control in multi-UAV systems, outlining architectures, channels, swarm tasks, urban applications, and future research directions.
The recent progress in unmanned aerial vehicles (UAV) technology has significantly advanced UAV-based applications for military, civil, and commercial domains. Nevertheless, the challenges of establishing high-speed communication links, flexible control strategies, and developing efficient collaborative decision-making algorithms for a swarm of UAVs limit their autonomy, robustness, and reliability. Thus, a growing focus has been witnessed on collaborative communication to allow a swarm of UAVs to coordinate and communicate autonomously for the cooperative completion of tasks in a short time with improved efficiency and reliability. This work presents a comprehensive review of collaborative communication in a multi-UAV system. We thoroughly discuss the characteristics of intelligent UAVs and their communication and control requirements for autonomous collaboration and coordination. Moreover, we review various UAV collaboration tasks, summarize the applications of UAV swarm networks for dense urban environments and present the use case scenarios to highlight the current developments of UAV-based applications in various domains. Finally, we identify several exciting future research direction that needs attention for advancing the research in collaborative UAVs.
研究の動機と目的
- Summarize the communication and control requirements for autonomous multi-UAV collaboration.
- Review current collaborative communication mechanisms and architectures for UAV swarms.
- Highlight UAV swarm network applications in urban environments and smart cities.
- Identify open challenges and propose future research directions for collaborative UAVs.
提案手法
- Conduct a structured literature review of collaborative UAV communication and control.
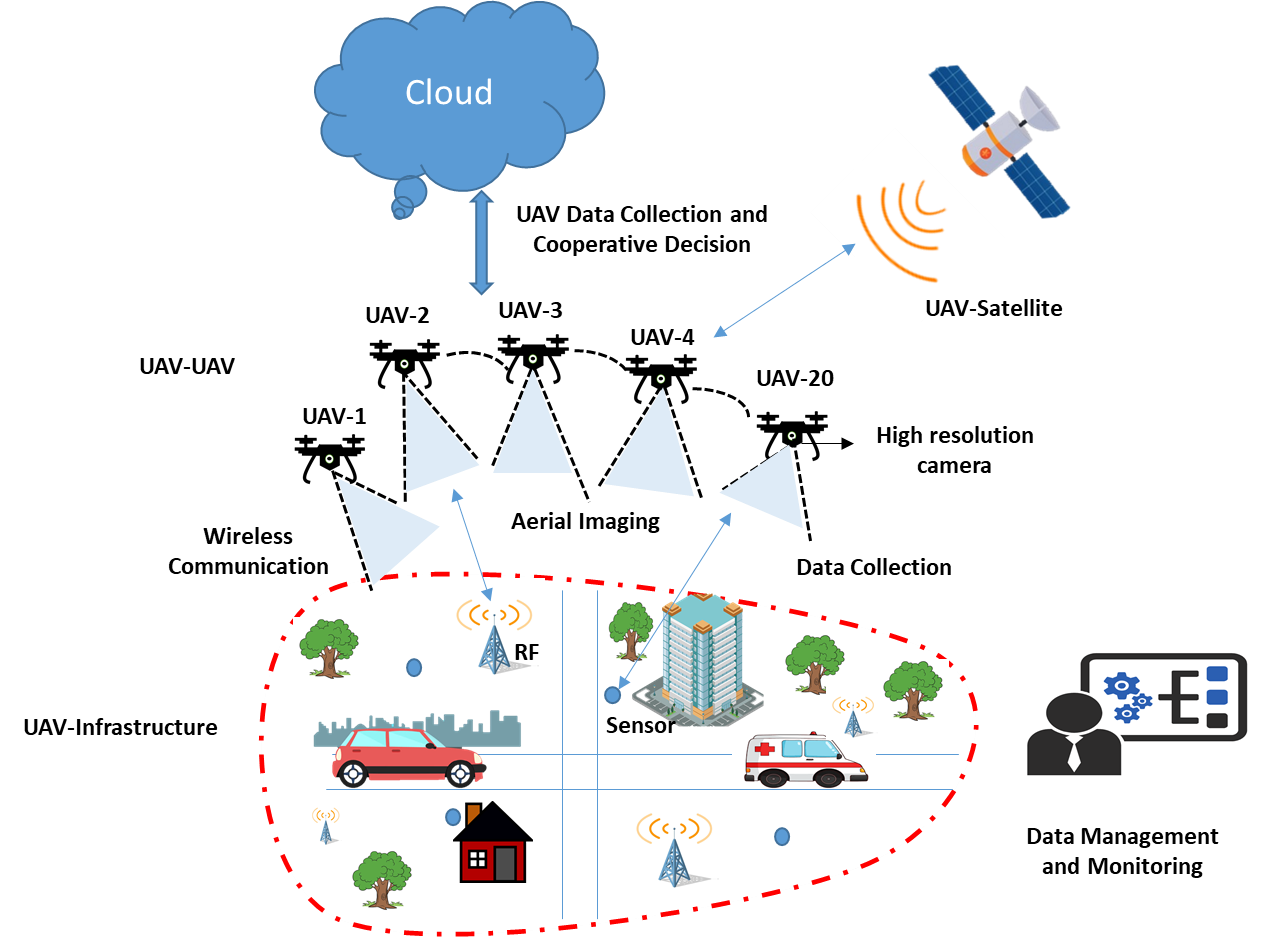
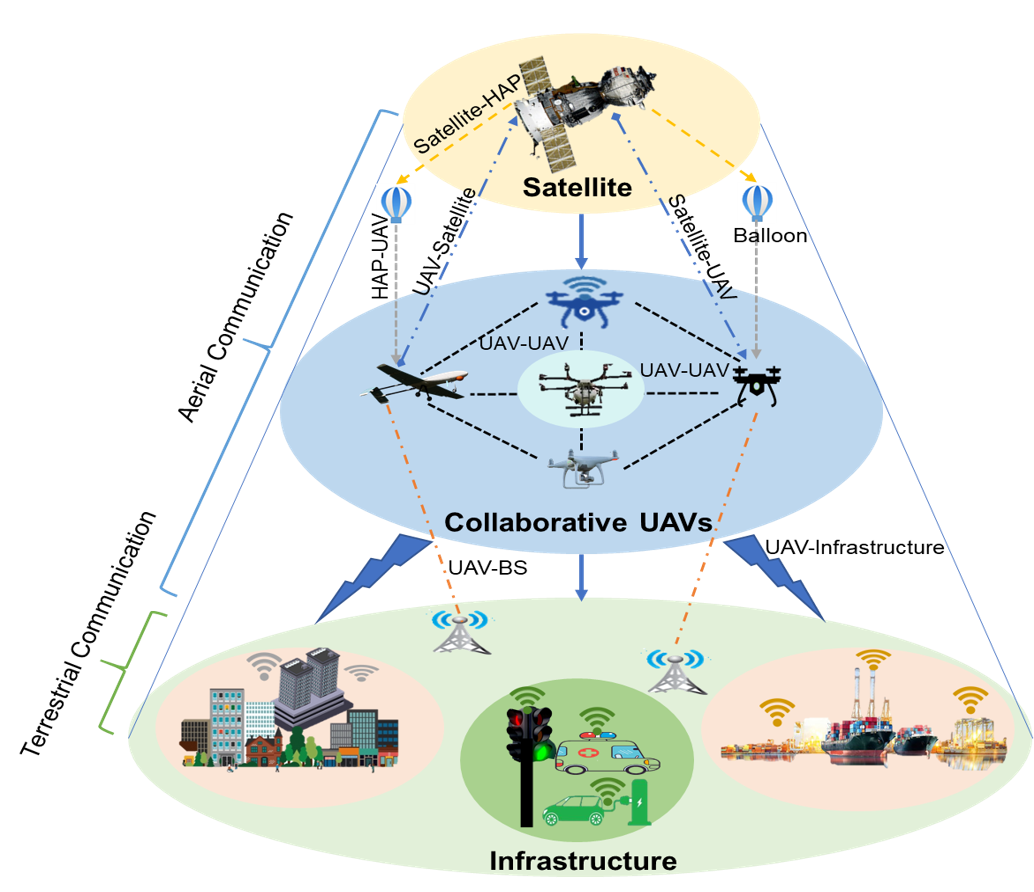
- Categorize communication modes into UAV-to-Infrastructure and UAV-to-UAV and analyze their requirements.
- Examine swarm-based collaborative tasks, routing, trajectory planning, and target localization.
- Survey use cases in urban environments and smart cities to illustrate current developments.
- Discuss reinforcement learning and other AI techniques applied to UAV swarm coordination.
実験結果
リサーチクエスチョン
- RQ1What are the essential communication and control requirements for multi-UAV collaboration?
- RQ2What are the main challenges and limitations in collaborative UAV networks (e.g., connectivity, latency, spectrum, mobility)?
- RQ3What use cases and applications demonstrate UAV swarm collaboration in urban environments?
- RQ4What future directions and technologies (e.g., 5G/6G, RL) can advance collaborative UAVs?
主な発見
- Collaborative UAV communication enables faster, more reliable, and fault-tolerant task completion in multi-UAV systems.
- UAV-to-Infrastructure and UAV-to-UAV links each present distinct requirements and challenges, including LoS, interference, latency, and spectrum considerations.
- Swarm-based tasks such as cooperative localization, trajectory formation, routing, and target tracking are actively explored with various algorithms.
- Deep reinforcement learning and other learning-based approaches are increasingly used to improve path planning, coordination, and resource management in UAV swarms.
- Applications in urban environments and smart cities highlight the potential for enhanced monitoring, disaster management, and surveillance.
- Despite advances, challenges remain in channel modeling, energy efficiency, scalable architectures, and secure, reliable operation of large UAV swarms.
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。