[論文レビュー] Continuous-time Trajectory Estimation: A Comparative Study Between Gaussian Process and Spline-based Approaches
この論文はガウス過程(GP)とスプラインベースの連続時間軌道推定を直接比較し、モデルとスプライン次数を整合させた場合、線形系と SE(3) の両方のシナリオで精度と解法時間が類似することを示している。
Continuous-time trajectory estimation is an attractive alternative to discrete-time batch estimation due to the ability to incorporate high-frequency measurements from asynchronous sensors while keeping the number of optimization parameters bounded. Two types of continuous-time estimation have become prevalent in the literature: Gaussian process regression and spline-based estimation. In this paper, we present a direct comparison between these two methods. We first compare them using a simple linear system, and then compare them in a camera and IMU sensor fusion scenario on SE(3) in both simulation and hardware. Our results show that if the same measurements and motion model are used, the two methods achieve similar trajectory accuracy. In addition, if the spline order is chosen so that the degree-of-differentiability of the two trajectory representations match, then they achieve similar solve times as well.
研究の動機と目的
- 離散時間バッチ推定の代替として、連続時間軌道推定を動機づけ、形式化する。
- GPベースとスプラインベースの表現の両方に適用可能な一般化された運動事前情報を開発する。
- シミュレーションデータと実機データの両方を用いた、線形およびSE(3)シナリオにおけるGPとスプライン手法の公正な比較を提供する。
- GPの運動事前情報をスプラインベースの推定にも適用可能に拡張し、等価比較を可能にする。
提案手法
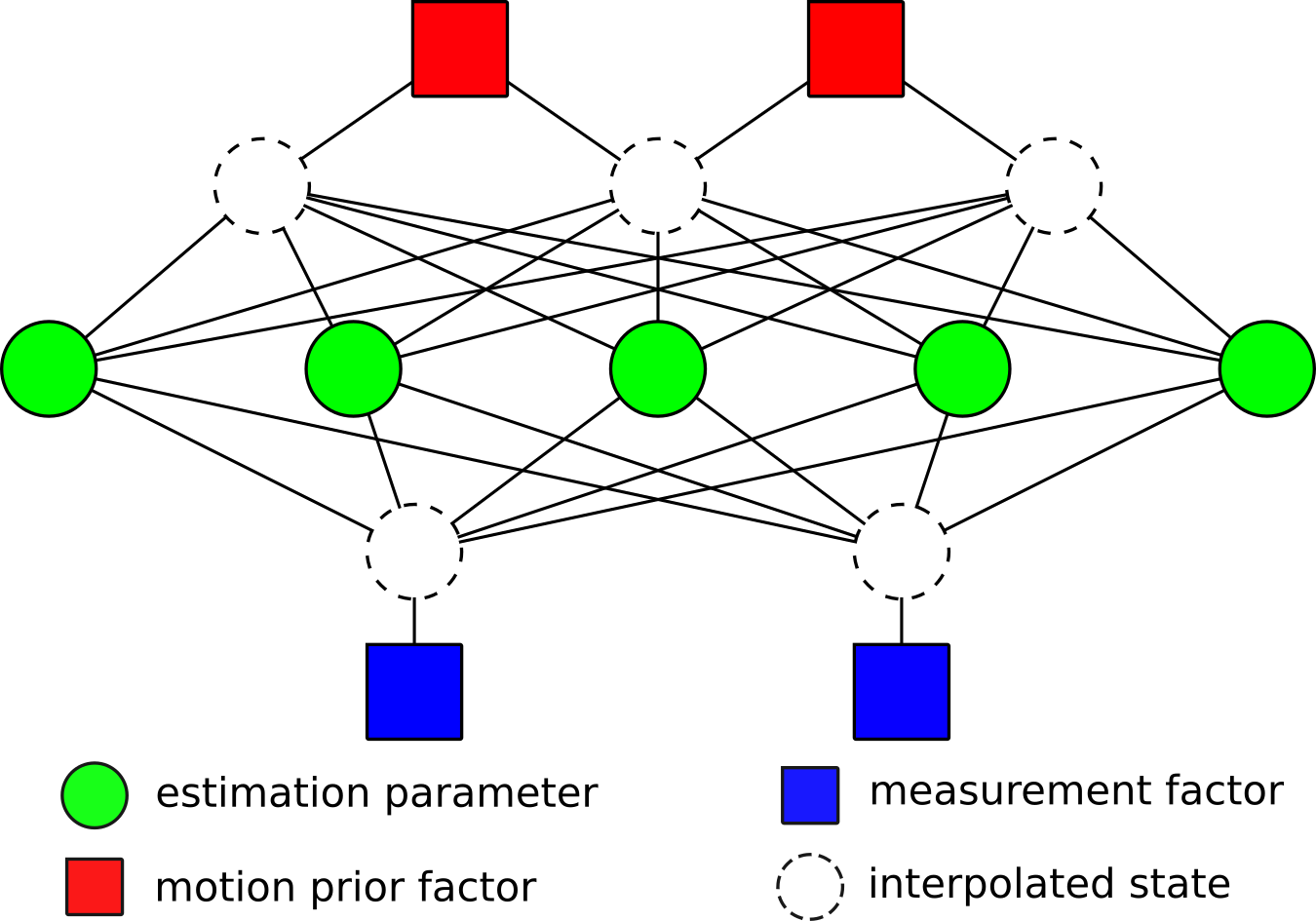
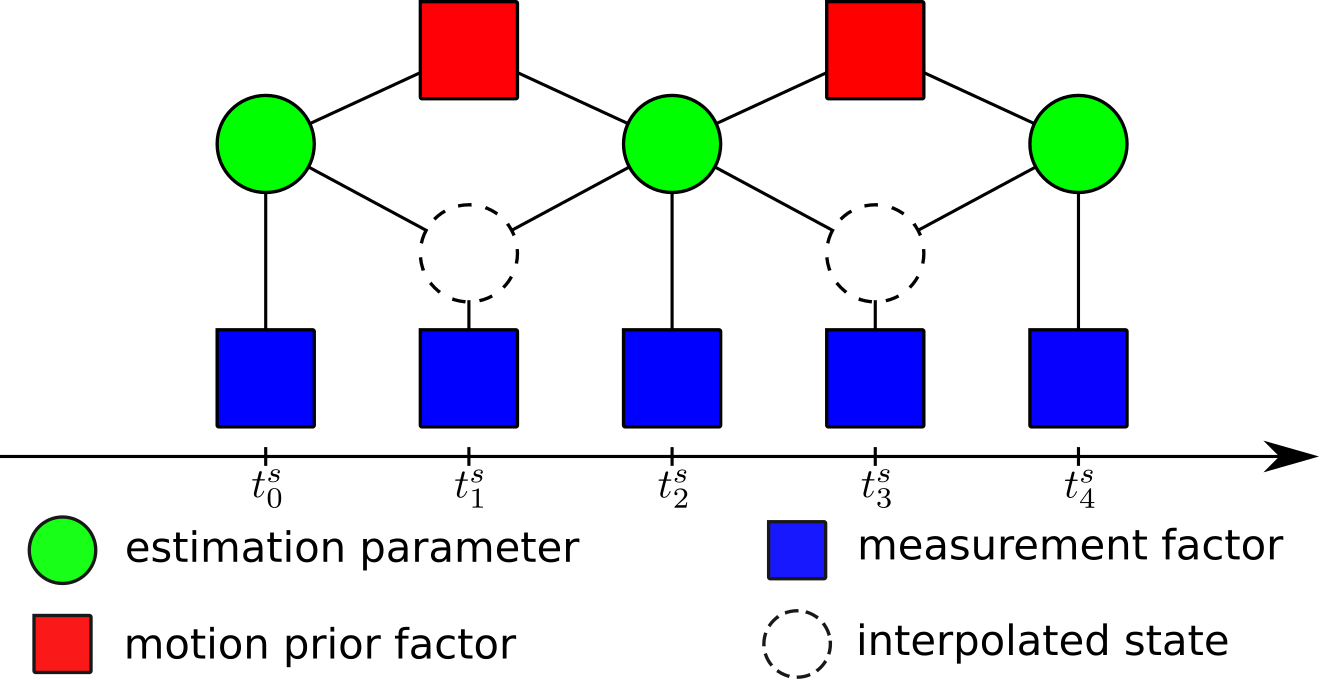
- 推定パラメータと状態補間関数を用いて、パラメータを時間を通じて状態へ写像する軌道を表現する。
- 線形系および Lie 群(SE(3))設定に対する運動事前情報を一般化し、WNOJ/WNOAモデルとその lie代数表現を含む。
- 線形系と Lie 群に対する GP 補間公式を導出する(式 (19)-(21) および (22)-(24) を含む)。
- ベクトル空間および Lie 群上のスプライン表現を導出し、SE(3) の累積形および群積形式を含む(式 (27)-(32))。
- 推定を測定残差と運動事前項を含む非線形最小二乗問題として定式化する(式 (5))。
- 二つのシナリオを通じてGPベースとスプラインベースの推定を比較する:線形WNOJ系とSE(3)におけるカメラ-IMU融合、シミュレーションデータと実機データを使用。
実験結果
リサーチクエスチョン
- RQ1同じ測定と運動モデルを用いた場合、GPベースとスプラインベースの連続時間軌道推定は類似した軌道精度を示すか?
- RQ2微分可能性の次数を合わせたスプライン次数は、SE(3) シナリオにおいてGPとスプライン表現の解法時間を同等にするか?
- RQ3非同期・高頻度の測定を伴う線形およびSE(3)のセンサ融合問題で、GPとスプライン推定器はどのように比較されるか?
主な発見
- 同じ測定と運動モデルを使用した場合、GPとスプライン法は類似した軌道精度を達成する。
- スプラインの次数がGP表現の微分可能性の次数と一致するように選択されると、両手法の解法時間は類似する。
- 本研究は線形とSE(3)の両ケースを対象とし、結論を検証するためにシミュレーションデータおよび実機データを用いている。
- 運動事前情報はGP表現とスプライン表現の両方で同時に使用できるよう一般化でき、フェアな比較を可能にする。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。