[論文レビュー] DrivAerNet++: A Large-Scale Multimodal Car Dataset with Computational Fluid Dynamics Simulations and Deep Learning Benchmarks
DrivAerNet++は、8,000の高忠実度CFDシミュレーション設計を含む、マルチモーダルな大規模自動車データセットであり、複数のデータモダリティとドラッグ予測のためのMLベンチマークを提供する。
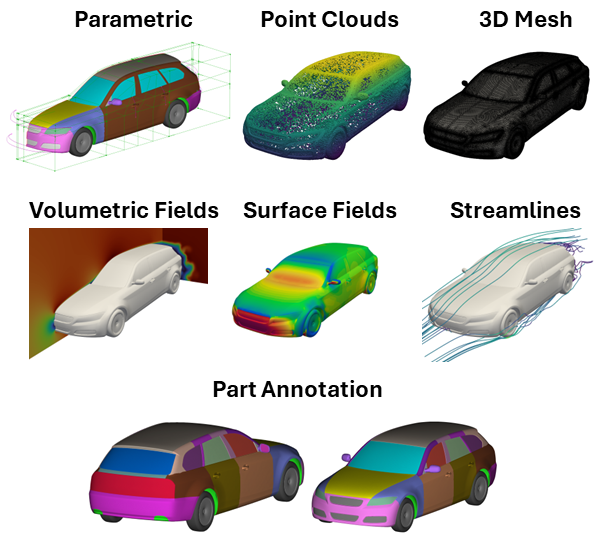
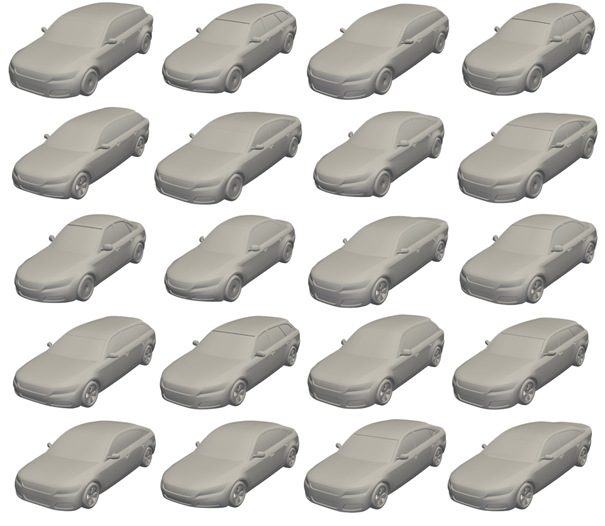
We present DrivAerNet++, the largest and most comprehensive multimodal dataset for aerodynamic car design. DrivAerNet++ comprises 8,000 diverse car designs modeled with high-fidelity computational fluid dynamics (CFD) simulations. The dataset includes diverse car configurations such as fastback, notchback, and estateback, with different underbody and wheel designs to represent both internal combustion engines and electric vehicles. Each entry in the dataset features detailed 3D meshes, parametric models, aerodynamic coefficients, and extensive flow and surface field data, along with segmented parts for car classification and point cloud data. This dataset supports a wide array of machine learning applications including data-driven design optimization, generative modeling, surrogate model training, CFD simulation acceleration, and geometric classification. With more than 39 TB of publicly available engineering data, DrivAerNet++ fills a significant gap in available resources, providing high-quality, diverse data to enhance model training, promote generalization, and accelerate automotive design processes. Along with rigorous dataset validation, we also provide ML benchmarking results on the task of aerodynamic drag prediction, showcasing the breadth of applications supported by our dataset. This dataset is set to significantly impact automotive design and broader engineering disciplines by fostering innovation and improving the fidelity of aerodynamic evaluations. Dataset and code available at: https://github.com/Mohamedelrefaie/DrivAerNet.
研究の動機と目的
- データ駆動型空力設計研究のための、巨大で多様性があり高忠実度のマルチモーダル車設計データセットを提供する。
- ドラッグ予測やその他の空力指標のために、ジオメトリベースおよびパラメトリックモデルを横断したMLベンチマークを可能にする。
- 代理モデル化ベンチマークとカテゴリ跨ぎの一般化分析を通じてデータセットの有用性を示す。
- 3Dメッシュ、点群、CFD場、パラメトリックデータ、注釈などのデータモダリティを提供し、さまざまなMLタスクを支援する。
提案手法
- 下部構造、車輪、リア、その他の部品にまたがる26パラメータを用いてDrivAerベースのパラメトリックモデルを形状変化させることで、8,000車設計を手続き的に生成する。
- SnappyHexMeshを用いた高忠実度CFDメッシュ作成、ケースあたり約24Mセル、OpenFOAM v11の定常状態k-omega SSTシミュレーション。
- 総合的なデータモダリティ: 3D STLメッシュ、ANSAパラメトリックモデル、表形式パラメータ、CFD場、表面場、注釈付きラベル。
- 3D幾何学深層学習(PointNet、GCNN、RegDGCNN)と表形式AutoML/MLモデル(XGBoost、LightGBM、RF)を用いた空力ドラッグの代理モデルのベンチマーク。
- 評価指標にはMSE、MAE、Max AE、R^2を含み、設計を横断するモデルの精度と一般化を比較する。
実験結果
リサーチクエスチョン
- RQ1多様な車配置に渡って頑健なドラッグの代理モデルを実現する大規模なマルチモーダル車データセットは可能か。
- RQ2ジオメトリベースとパラメトリックMLアプローチは、単一カテゴリ設計と複数カテゴリ設計に渡るドラッグ予測でどう比較されるか。
- RQ3データセットの多様性は、カテゴリ横断のドラッグ予測モデルの一般化能力にどの程度影響するか。
- RQ43Dメッシュベースとパラメトリックデータベースドラッグ予測の、モデル精度と計算時間のトレードオフは何か。
主な発見
| モデル | MSE (×10^-5) | MAE (×10^-3) | Max AE (×10^-3) | R^2 | 学習時間 | 推論時間 | パラメータ数 |
|---|---|---|---|---|---|---|---|
| PointNet (DrivAerNet) | 12.0 | 8.85 | 10.18 | 0.826 | 0.5hrs | 0.51s | 2,348,097 |
| GCNN (DrivAerNet) | 10.7 | 7.17 | 10.97 | 0.874 | 10.4hrs | 20.71s | 100,481 |
| RegDGCNN (DrivAerNet) | 8.01 | 6.91 | 8.80 | 0.901 | 3.2hrs | 0.52s | 3,164,257 |
| PointNet (DrivAerNet++) | 14.9 | 9.60 | 12.45 | 0.643 | 2.06hrs | 0.84s | 2,348,097 |
| GCNN (DrivAerNet++) | 17.1 | 10.43 | 15.03 | 0.596 | 49hrs | 50.8s | 100,481 |
| RegDGCNN (DrivAerNet++) | 14.2 | 9.31 | 12.79 | 0.641 | 12.6hrs | 0.85s | 3,164,257 |
- DrivAerNet++は、ケースあたり24Mメッシュセルの設計を含む8,000車設計で、総データ量は39 TB。
- 幾何的深層学習モデルは性能が異なる:RegDGCNNはDrivAerNet(Table 2)でMSE 8.01e-5、MAE 6.91e-3、Max AE 8.80e-3、R^2 0.901で最良を達成。
- DrivAerNet++(全車種)では、RegDGCNNがMSE 14.2e-5、MAE 9.31e-3、Max AE 12.79e-3、R^2 0.641を達成し、多様な設計間で一般化すると性能が低下することを示している。
- AutoML/パラメトリックモデルはデータセットサイズと共にクロスデータセットの性能が向上を示す;XGBoostのR^2は、学習データを640から3,200サンプルへ増やすと約0.35から約0.55へ上昇。
- 本研究は顕著な一般化の課題を浮き彫りにしている:単一の車種で訓練されたモデルは、全車種設計を対象としたテストでR^2が低くなる(0.82-0.90 から約0.60)。
- このデータセットは、ドラッグ代理モデル化以外にもCFD加速、形状/部品分類、3D再構成など複数のタスクをサポートする。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。