[論文レビュー] From Model-Based to Data-Driven Simulation: Challenges and Trends in Autonomous Driving
モデルベースからデータ駆動型および混合ニューラルシミュレーションへと移行する傾向を強調し、標準化と妥当性の懸念とともに、コンテンツ・挙動・知覚のリアリズム課題を概説する。
Simulation is an integral part in the process of developing autonomous vehicles and advantageous for training, validation, and verification of driving functions. Even though simulations come with a series of benefits compared to real-world experiments, various challenges still prevent virtual testing from entirely replacing physical test-drives. Our work provides an overview of these challenges with regard to different aspects and types of simulation and subsumes current trends to overcome them. We cover aspects around perception-, behavior- and content-realism as well as general hurdles in the domain of simulation. Among others, we observe a trend of data-driven, generative approaches and high-fidelity data synthesis to increasingly replace model-based simulation.
研究の動機と目的
- 自動運転シミュレーションアプローチの階層的分類と、それらがリアリズムと方法論でどのように異なるかを明確化する。
- AVシミュレーションにおけるコンテンツリアリズム、挙動リアリズム、知覚リアリズムの現状の課題を特定する。
- リアリズムのギャップを解消するソリューションとして、データ駆動型およびニューラルシミュレーションの新興傾向を強調する。
- 標準化、データ/計算ニーズ、移転性といった水平的課題を議論する。
- AVシミュレーションの今後の研究方向と未解決の問題に関する指針を示す。
提案手法
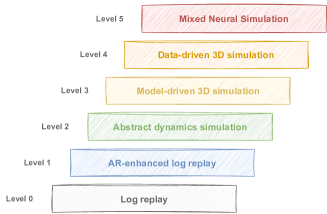
- ログリプレイから混合ニューラルシミュレーションまでの階層的なシミュレーションレベルの分類法を提案する。
- コンテンツリアリズム、挙動リアリズム、知覚リアリズムの各領域の文献をレビューし、傾向を map する。
- 各リアリズム次元に関連する課題と傾向を分析する。
- データ駆動アプローチ(例:NeRFs、拡散モデル、GANs)とそれらがコンテンツリアリズムに与える影響を統合する。
- データ駆動とモデルベースのシミュレーションの利点と限界、および混合アプローチの可能性を議論する。
![Figure 1 : Examples of our proposed simulation levels. Top-left to bottom-right: AR-enhanced (level 1), SUMO (level 2), CARLA (level 3), Block-NeRF (level 4) [ 59 ] .](https://ar5iv.labs.arxiv.org/html/2305.13960/assets/img/screenshots_merged.png)
実験結果
リサーチクエスチョン
- RQ1自動運転のシミュレーションアプローチを、異なるリアリズムおよび方法論レベルを反映してどのように分類できるか。
- RQ2AVシミュレーションにおけるコンテンツリアリズム、挙動リアリズム、知覚リアリズムの主な課題は何か。
- RQ3リアリズムのギャップを埋めるために出現している傾向と手法は何か、そしてそれらは将来のシミュレーションレベルにどのように影響するか。
- RQ4新しいシミュレーションパラダイムの採用に影響を与える水平的課題(標準化、データ/計算、妥当性、移転性)は何か。
主な発見
- シミュレーションレベルの階層的スキーム(0から5)を提案し、コンテンツ・ダイナミクス・センサーのシミュレーション方法の違いでAVシミュレータを比較する。
- コンテンツリアリズムはデータ駆動手法(例:NeRFs、GANs、拡散モデル)と手作業資産の削減を図る手続き的生成によって次第に支持され、ハンドクラフト資産の必要性を低減している。
- 挙動リアリズムは、長尾の発生事象や重大なシナリオをよりよく捉えるために、MLベースのシーケンスモデル、トランスフォーマ、対向的強化学習、知識ガイド手法へと移行している。
- 知覚リアリズムは、データ駆動のセンサーモデリング、少数ショット学習、学習済みノイズモデルによって、カメラ、ライダ、レーダーの忠実度を向上させる。
- 水平的課題には標準化(OpenSCENARIO/OpenDRIVE/OpenOSI)、データ/計算要件、シミュレーションの妥当性と移転性の評価が含まれる。
- 全体として、データ駆動および混合ニューラルシミュレーションの高度なレベルへと収束する方向に向かっており、いくつかの未解決の研究問題が残っている。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。