[論文レビュー] Koopman Operators in Robot Learning
この論文はロボティクスにおけるKoopman演算子理論を概観し、実行可能なコードを伴う実践的なチュートリアルを提供し、EDMDおよび関連アプローチを用いたデータ駆動モデリング、状態推定、制御を多様なロボットプラットフォームにわたって扱う。
Koopman operator theory offers a rigorous treatment of dynamics and has been emerging as an alternative modeling and learning-based control method across various robotics sub-domains. Due to its ability to represent nonlinear dynamics as a linear (but higher-dimensional) operator, Koopman theory offers a fresh lens through which to understand and tackle the modeling and control of complex robotic systems. Moreover, it enables incremental updates and is computationally inexpensive, thus making it particularly appealing for real-time applications and online active learning. This review delves deeply into the foundations of Koopman operator theory and systematically builds a bridge from theoretical principles to practical robotic applications. We begin by explaining the mathematical underpinnings of the Koopman framework and discussing approximation approaches for incorporating inputs into Koopman-based modeling. Foundational considerations, such as data collection strategies as well as the design of lifting functions for effective system embedding, are also discussed. We then explore how Koopman-based models serve as a unifying tool for a range of robotics tasks, including model-based control, real-time state estimation, and motion planning. The review proceeds to a survey of cutting-edge research that demonstrates the versatility and growing impact of Koopman methods across diverse robotics sub-domains: from aerial and legged platforms to manipulators, soft-bodied systems, and multi-agent networks. A presentation of more advanced theoretical topics, necessary to push forward the overall framework, is included. Finally, we reflect on some key open challenges that remain and articulate future research directions that will shape the next phase of Koopman-inspired robotics. To support practical adoption, we provide a hands-on tutorial with executable code at https://shorturl.at/ouE59.
研究の動機と目的
- 少量データで新しい環境で動作するロボットのランタイム学習を動機づける。
- Koopman演算子理論をデータ効率が高く、解釈可能で、非線形ロボット力学の線形表現フレームワークとして提示する。
- Koopman演算子を用いたロボット工学の最近のアルゴリズムと応用の進展を調査・統合する。
- Koopmanベースのモデリングと制御の実装を支援する実践的なチュートリアルと実行可能なコードを提供する。
提案手法
- Koopman演算子の概念と、非線形ダイナミクスが線形になる空間へ状態をリフティングするアイデアを説明する。
- 有限次元の不変部分空間とデータからKoopman演算子を近似するEDMDアプローチを導入する。
- Koopmanベースのモデリングにおける入力と制御の取り扱い、状態の拡張や二次形式の利用方法を議論する。
- Koopmanベースの制御器のデータ収集、リフティング関数の選択、演算子推定、安定性の考慮を概説する。
- Koopmanモデルの上に線形制御器(例:LQR)または非線形MPCを構築する方法を説明する。
実験結果
リサーチクエスチョン
- RQ1Koopman演算子理論は非線形ロボット系のランタイムでのデータ効率の高い学習をどう可能にするか。
- RQ2ロボット工学において有限データからKoopman演算子を近似する効果的なデータ駆動法(例:EDMD)は何か。
- RQ3ロボット応用で精度と次元性のバランスをとるリフティング辞書はどのように選択すべきか。
- RQ4入出力および制御信号をKoopmanベースのモデリングと制御フレームワークに組み込むにはどうするか。
- RQ5Koopmanベースのロボティクスにおけるデータ収集、モデル学習、制御器設計の実践的ワークフローは何か。
主な発見
- Koopman演算子は非線形ロボットダイナミクスを線形に表現し、LQRのような線形制御ツールを可能にする。
- EDMDや関連手法が疎なデータから演算子を近似するため、データ効率の良い学習が可能で、オンライン更新を可能にする。
- アプローチは演算子理論的特性と固有構造解析を通じて解釈性と安定性保証の可能性を提供する。
- EDMDベースの予測子は選択された辞書内でKoopmanの作用を近似し、辞書サイズが特定の条件下で大きくなると収束性を持つ。
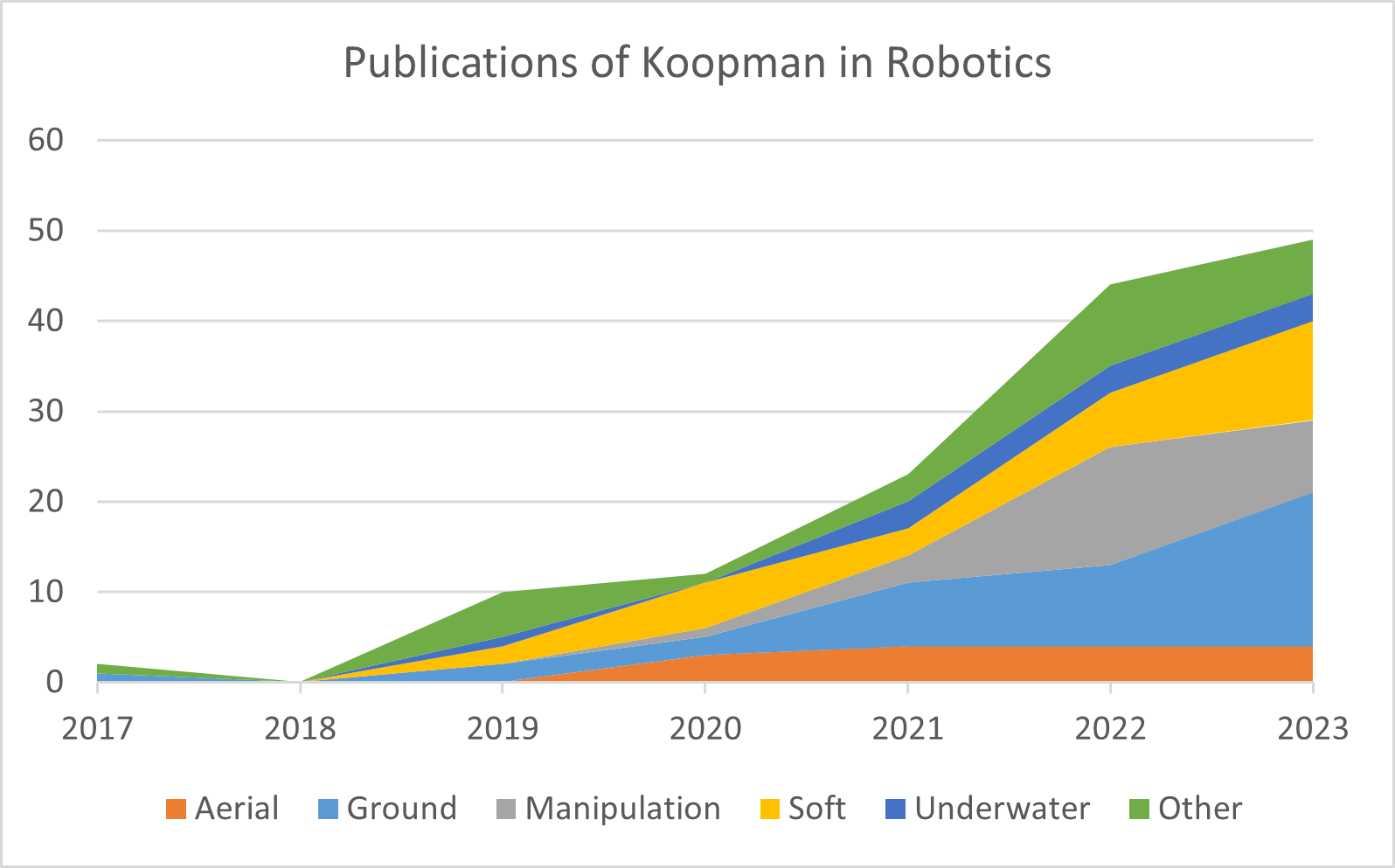
- 調査は広範なロボットプラットフォーム(航空機型、脚歩行、車輪、潜水、ソフト、マニピュレータ)を対象とし、実践的なチュートリアル、コード、実装ガイダンスを論じる。
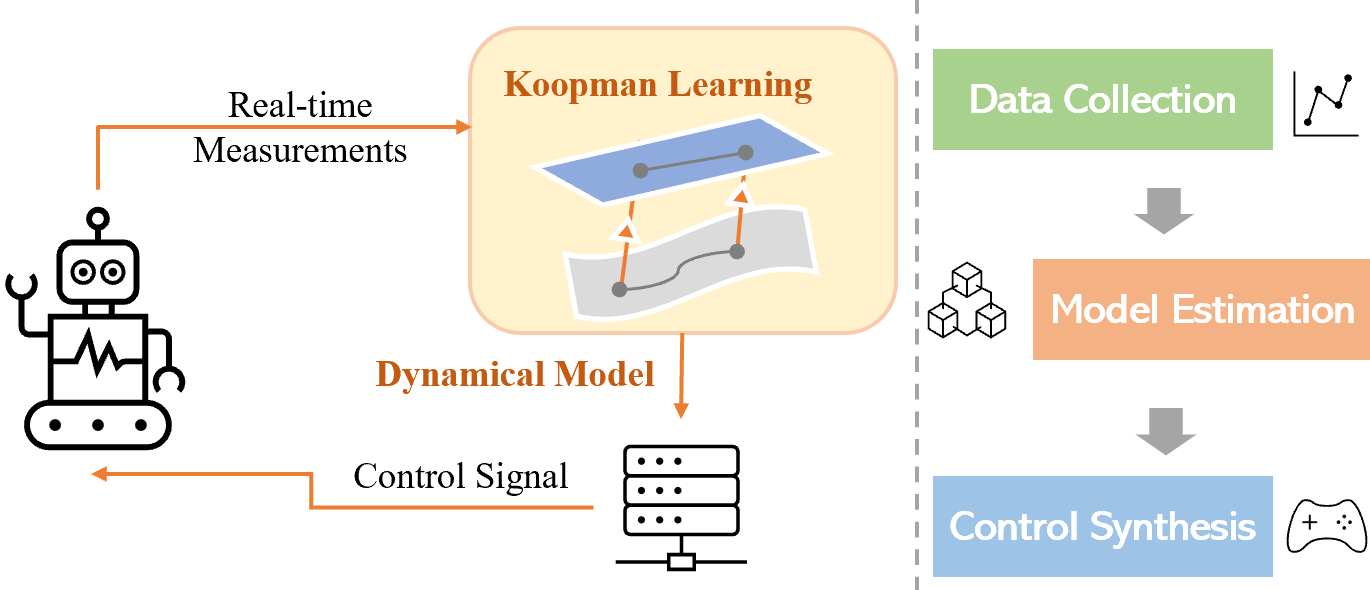
- フレームワークはデータ収集、モデル学習、制御設計のステップを統合することで、ランタイム学習とリアルタイム制御を支援する。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。