[論文レビュー] Large Language Models as Urban Residents: An LLM Agent Framework for Personal Mobility Generation
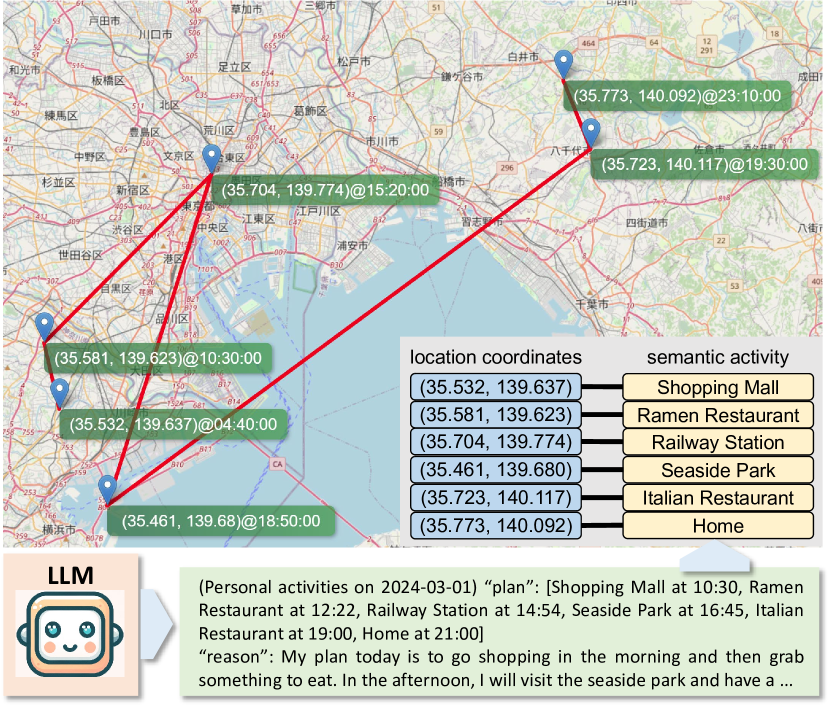
本論文は、意味的パターン抽出、自己整合性評価、動機付け主導の、取得拡張生成を組み合わせて個人のモビリティ軌跡を生成する LLM エージェントフレームワークである LLMob を提案し、実際の東京データで検証している。
This paper introduces a novel approach using Large Language Models (LLMs) integrated into an agent framework for flexible and effective personal mobility generation. LLMs overcome the limitations of previous models by effectively processing semantic data and offering versatility in modeling various tasks. Our approach addresses three research questions: aligning LLMs with real-world urban mobility data, developing reliable activity generation strategies, and exploring LLM applications in urban mobility. The key technical contribution is a novel LLM agent framework that accounts for individual activity patterns and motivations, including a self-consistency approach to align LLMs with real-world activity data and a retrieval-augmented strategy for interpretable activity generation. We evaluate our LLM agent framework and compare it with state-of-the-art personal mobility generation approaches, demonstrating the effectiveness of our approach and its potential applications in urban mobility. Overall, this study marks the pioneering work of designing an LLM agent framework for activity generation based on real-world human activity data, offering a promising tool for urban mobility analysis.
研究の動機と目的
- LLMsを意味的に豊かな活動データと整合させ、個人のモビリティ生成を行えるようにする。
- 活動軌跡を生成するための信頼性が高く解釈可能な戦略を開発する。
- 習慣パターンと動的な動機を組み込んで都市モビリティをシミュレーションする。
- 実世界データでフレームワークを検証し、従来モデルと比較する。
提案手法
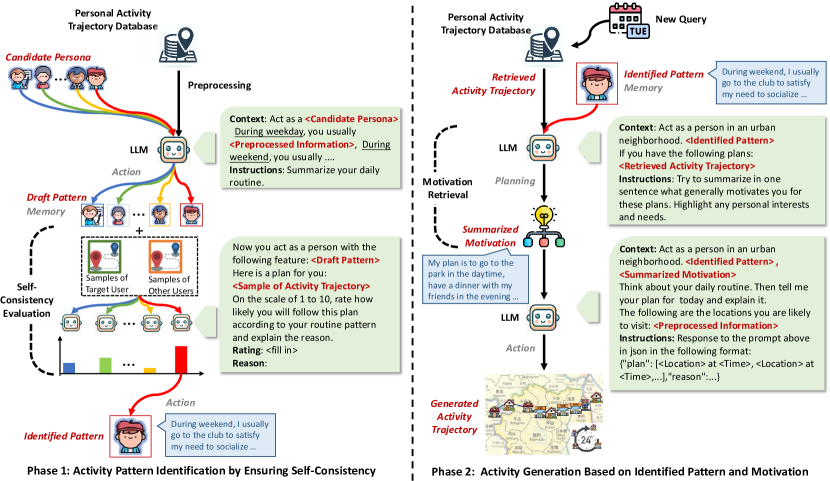
- 二段階パイプライン: (i) LLMとペルソナ誘発プロンプトを用いた履歴データからの自己整合性のある活動パターンの識別; (ii) 取得拡張プロンプトを用いた動機付け主導の活動生成。
- 自己整合性評価は候補パターンを対象と他のユーザーと比較して最良のパターンを選択する。
- 動機の取得戦略は、進化ベースと学習ベースの二つ。日付の類似性を推定する対照学習モデル f_theta を含む。
- パターンと要約された動機を統合して日々の活動軌跡を生成する。
- 生成と分析のLLMコアとして GPT-3.5-Turbo-0613 を使用。
実験結果
リサーチクエスチョン
- RQ1RQ1: LLMを日常の個人活動に関する意味的に豊かなデータとどのように整合させることができるか?
- RQ2RQ2: LLMを用いた信頼性が高く意味のある活動生成のための効果的な戦略は何か?
- RQ3RQ3: 都市モビリティを向上させるためのLLMsの潜在的な適用例は何か?
主な発見
| Models | SD | SI | ST-ACT | ST-LOC |
|---|---|---|---|---|
| MM | 0.018 | 0.276 | 0.644 | 0.681 |
| LSTM | 0.017 | 0.271 | 0.585 | 0.652 |
| DeepMove | 0.008 | 0.153 | 0.534 | 0.623 |
| LLMob-E | 0.053 | 0.046 | 0.125 | 0.559 |
| LLMob-L | 0.049 | 0.054 | 0.136 | 0.570 |
| LLMob-L w/o P | 0.061 | 0.080 | 0.270 | 0.600 |
| LLMob-E w/o P | 0.055 | 0.069 | 0.223 | 0.530 |
| LLMob w/o P & M | 0.061 | 0.081 | 0.268 | 0.606 |
- LLMobは、Markov、LSTM、DeepMove などのベースラインと比較して、時間的パターン生成(ST-ACT, ST-LOC)で優れている。
- 本フレームワークは空間パターンでも競争力を維持し、異常なパンデミック様の状況下でも堅牢性を示す。
- 動機付けを意識した生成により、LLMエージェントは現実的な日々の軌跡を生成し、外部要因(例: パンデミックの促し)に適応できる。
- 取得拡張戦略は生成された活動軌跡の解釈性と信頼性を向上させる。
- 自己整合性評価はLLM出力を実世界の日常活動データと整合させるのに役立つ。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。