[論文レビュー] Traj-LIO: A Resilient Multi-LiDAR Multi-IMU State Estimator Through Sparse Gaussian Process
Traj-LIO は、連続時間・GPベースの多 LiDAR・多 IMU 状態推定器を自動駆動(IMU 非依存)とし、SO(3) とベクトル空間で回転と平行移動をデカップリングすることによりセンサ故障に頑健である。
Nowadays, sensor suits have been equipped with redundant LiDARs and IMUs to mitigate the risks associated with sensor failure. It is challenging for the previous discrete-time and IMU-driven kinematic systems to incorporate multiple asynchronized sensors, which are susceptible to abnormal IMU data. To address these limitations, we introduce a multi-LiDAR multi-IMU state estimator by taking advantage of Gaussian Process (GP) that predicts a non-parametric continuous-time trajectory to capture sensors' spatial-temporal movement with limited control states. Since the kinematic model driven by three types of linear time-invariant stochastic differential equations are independent of external sensor measurements, our proposed approach is capable of handling different sensor configurations and resilient to sensor failures. Moreover, we replace the conventional $\mathrm{SE}(3)$ state representation with the combination of $\mathrm{SO}(3)$ and vector space, which enables GP-based LiDAR-inertial system to fulfill the real-time requirement. Extensive experiments on the public datasets demonstrate the versatility and resilience of our proposed multi-LiDAR multi-IMU state estimator. To contribute to the community, we will make our source code publicly available.
研究の動機と目的
- 冗長で非同期の LiDAR および IMU を使用する際の頑健な状態推定を動機付ける。
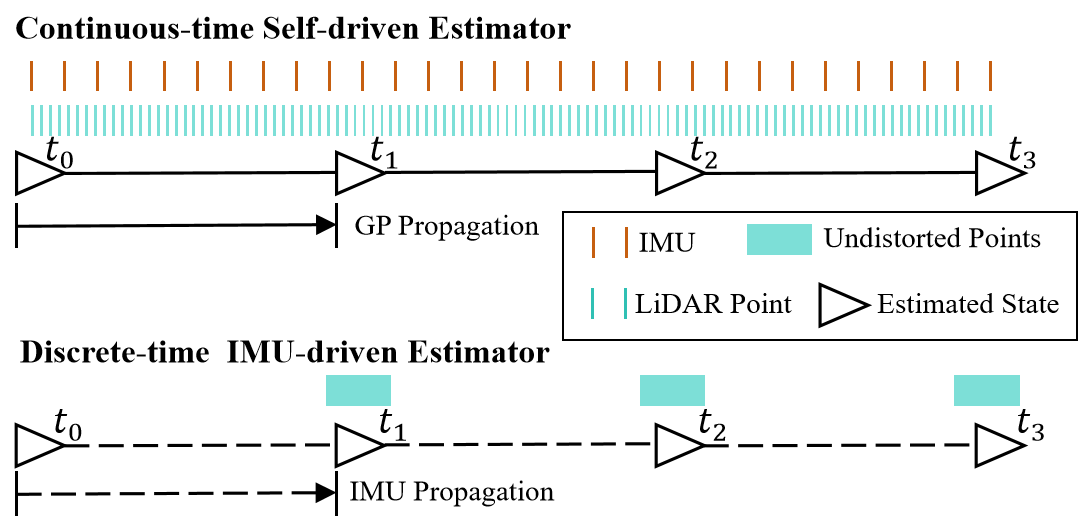
- 固定離散時間パイプラインに依存せず、複数のセンサを融合するための連続時間・GPベースの枠組みを開発する。
- LiDAR-慣性系 odometry において、回転と平行移動をデカップルして解析的ヤコビ行列とリアルタイム性能を実現する。
- IMU データに依存しない、GP事前分布によって駆動される自己駆動の運動モデルを提供し、頑健性を高める。
提案手法
- 連続時間状態 x(t) を時間ウィンドウ上のガウス過程で表現し、任意のタイムスタンプで補間を介してクエリ可能にする。
- ベクトル空間上には三つの GP 事前分布(Random Walk、Constant Velocity、Constant Acceleration)を、SO(3) 上には回転をモデル化する多様体対応の GP を用いる。
- 回転(SO(3))を平行移動(ベクトル空間)からデカップリングし、ヤコビ行列を簡素化してIMU測定を統合する。
- IMU 入力に依存せずに伝搬を行う、スパース GP 事前分布によって推進される自己駆動の運動モデルを採用する。
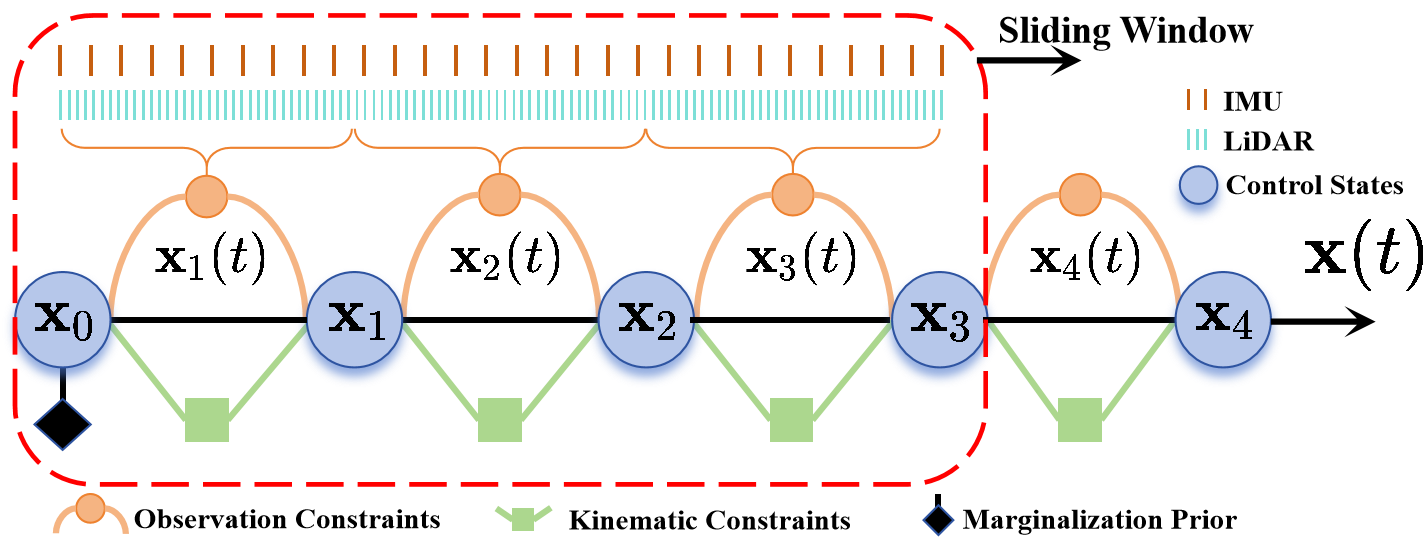
- 状態推定を、局所的 LTISDE を含むスパース GP 回帰として定式化し、リアルタイム性能のために解析的ヤコビ行列を提供する。
- 測定時刻でセンサ測定を補間しつつ、古い状態を周辺化する連続時間スライディングウィンドウ最適化を採用する。
実験結果
リサーチクエスチョン
- RQ1連続時間フレームワークにおいて、同期的なセンサ測定を要求せずに複数 LiDAR・IMU システムをどのように融合できるか?
- RQ2いくつかの IMU や LiDAR が故障またはデータが劣化しても、GP ベースの自己駆動運動モデルは精度と頑健性を維持できるか?
- RQ3回転と平行移動をデカップリングすることは、計算効率を改善し、GP ベースの LiDAR-慣性系オドメトリをリアルタイムに可能にするか?
- RQ4提案手法は、さまざまなセンサ構成をどの程度まで扱え、公開データセット上で競争力のある精度を達成できるか?
主な発見
- このアプローチは、GPベースの自己駆動運動モデル内の測定としてすべてのセンサ入力を扱うことで、センサ故障に対する頑健性を実現する。
- 回転(SO(3))を翻訳(ベクトル空間)からデカップリングすることで解析的ヤコビ行列を実現し、GP ベースの推定におけるリアルタイム性能をサポートする。
- 複数の LiDAR および複数の IMU を含む柔軟なセンサ構成を、連続時間の軌跡表現とともにサポートする。
- GP 事前分布内の補間により、任意のタイムスタンプで状態をクエリ可能にし、密な離散状態の必要性を減らす。
- ハンドヘルドから過激な UAV までのデータセットで競争力のある精度を示し、適用範囲の広さを示す。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。