[論文レビュー] 4D Millimeter-Wave Radar in Autonomous Driving: A Survey
自動運転向けの4D mmWaveレーダーに関する理論、信号処理、キャリブレーション、学習ベースの点群生成、データセット、知覚・定位・地図作成、将来動向を網羅する総合的な調査。
The 4D millimeter-wave (mmWave) radar, proficient in measuring the range, azimuth, elevation, and velocity of targets, has attracted considerable interest within the autonomous driving community. This is attributed to its robustness in extreme environments and the velocity and elevation measurement capabilities. However, despite the rapid advancement in research related to its sensing theory and application, there is a conspicuous absence of comprehensive surveys on the subject of 4D mmWave radar. In an effort to bridge this gap and stimulate future research, this paper presents an exhaustive survey on the utilization of 4D mmWave radar in autonomous driving. Initially, the paper provides reviews on the theoretical background and progress of 4D mmWave radars, encompassing aspects such as the signal processing workflow, resolution improvement approaches, and extrinsic calibration process. Learning-based radar data quality improvement methods are present following. Then, this paper introduces relevant datasets and application algorithms in autonomous driving perception, localization and mapping tasks. Finally, this paper concludes by forecasting future trends in the realm of 4D mmWave radar in autonomous driving. To the best of our knowledge, this is the first survey specifically dedicated to the 4D mmWave radar in autonomous driving.
研究の動機と目的
- 自動運転における4D mmWaveレーダーの研究を動機づけ、統合し、その利点と現在の研究課題を強調する。
- 4D mmWaveレーダーの理論的背景、信号処理の流れ、分解能向上手法を要約する。
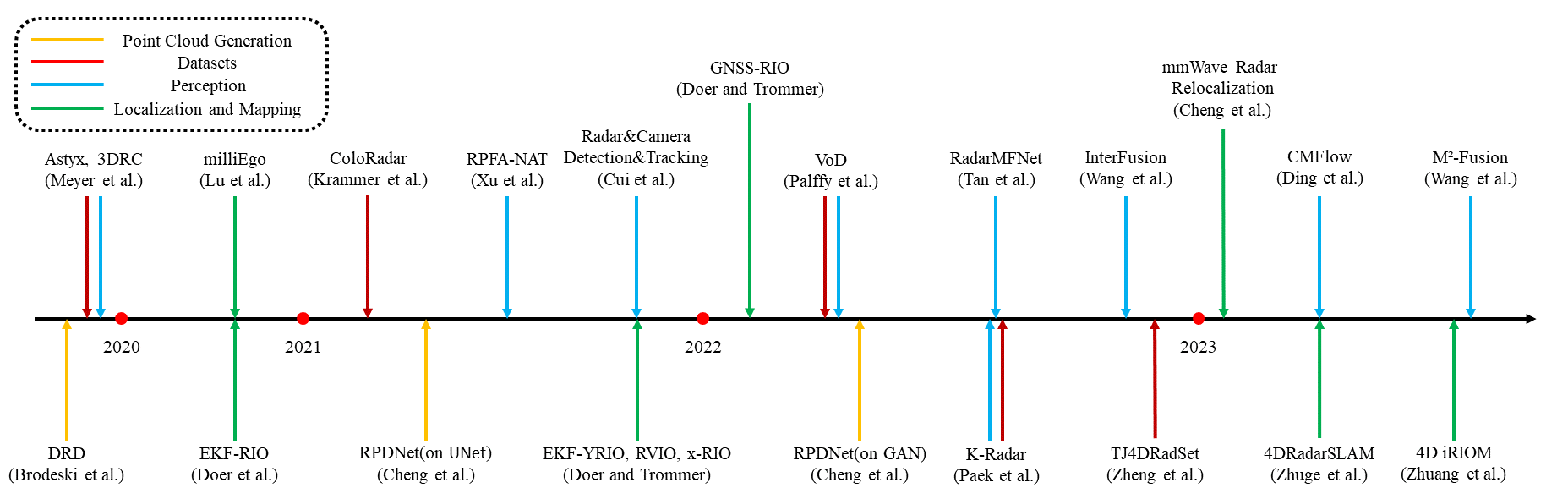
- レーダー点群生成のための利用可能なデータセットと学習ベース手法を調査する。
- 4Dレーダーを用いる知覚、定位、地図作成アルゴリズムをレビューし、将来の方向性を議論する。
提案手法
- 4D mmWaveレーダーの信号処理の流れとデータ形式を説明する。
- ハードウェアとソフトウェアのレベルでの分解能向上アプローチを説明する。
- 4Dレーダーシステムの外部キャリブレーション手法を要約する。
- 学習ベースのレーダー点群生成手法とそのデータセットをレビューする。
- 4Dレーダーを用いる知覚、定位、地図作成アプリケーションを分類し議論する。
- 4Dレーダー技術の将来動向と研究方向性を議論する。」],
- research_questions:[
- 自動運転における4D mmWaveレーダーの理論的背景と処理パイプラインは何か?
- 4Dレーダー点群生成および下流タスクの利用可能なデータセットと学習ベース手法は何か?
- 知覚、定位、地図作成に4Dレーダー信号はどのように用いられ、他センサとの融合戦略は何があるか?
- 自動運転における4D mmWaveレーダー研究の今後の方向性と課題は何か?
![Figure 1: The traditional signal processing flow and corresponding data formats of 4D mmWave radars [ 5 ] [ 6 ] [ 7 ]](https://ar5iv.labs.arxiv.org/html/2306.04242/assets/flow.png)
実験結果
リサーチクエスチョン
- RQ1What is the theoretical and processing pipeline for 4D mmWave radar in autonomous driving?
- RQ2What datasets and learning-based methods exist for 4D radar point-cloud generation and downstream tasks?
- RQ3How are 4D radar data used for perception, localization, and mapping, and what fusion strategies exist with other sensors?
- RQ4What are the anticipated future directions and challenges in 4D mmWave radar research for autonomous driving?
主な発見
- 本研究は自動運転における4D mmWaveレーダーに特化した初の調査であると位置づける。
- 4D mmWaveレーダーの信号処理フロー、データ形式、分解能向上技術の概要を示す。
- 外部キャリブレーション手法と学習ベースのレーダー点群生成アプローチをレビューする。
- 4Dレーダーを用いる知覚、定位、地図作成のデータセットと応用の統合的な見解を提供する。
- 事前点群データ利用やデータセット拡充を含む多モーダル融合戦略と将来動向を議論する。
- 4Dレーダーは悪条件下での頑健性を示し、高さ、距離、方位、速度の測定を可能にする。
より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。