[論文レビュー] Perceptive Locomotion through Whole-Body MPC and Optimal Region Selection
本論文は表面選択を全身MPCから分離する洞察に富んだ歩行フレームワークを提示し、50–100 Hz でのオンライン再計画と知覚エラーおよび滑りへの頑健性の向上を可能にする。
Real-time synthesis of legged locomotion maneuvers in challenging industrial settings is still an open problem, requiring simultaneous determination of footsteps locations several steps ahead while generating whole-body motions close to the robot's limits. State estimation and perception errors impose the practical constraint of fast re-planning motions in a model predictive control (MPC) framework. We first observe that the computational limitation of perceptive locomotion pipelines lies in the combinatorics of contact surface selection. Re-planning contact locations on selected surfaces can be accomplished at MPC frequencies (50-100 Hz). Then, whole-body motion generation typically follows a reference trajectory for the robot base to facilitate convergence. We propose removing this constraint to robustly address unforeseen events such as contact slipping, by leveraging a state-of-the-art whole-body MPC (Croccodyl). Our contributions are integrated into a complete framework for perceptive locomotion, validated under diverse terrain conditions, and demonstrated in challenging trials that push the robot's actuation limits, as well as in the ICRA 2023 quadruped challenge simulation.
研究の動機と目的
- 不確かな産業環境におけるリアルタイムで頑健な脚歩行移動性を不確かな産業環境で実現する動機づけ。
- 接触計画を全身制御から分離し、迅速なオンライン再計画を可能にする。
- 地形知覚、凸面表面の分割、および表面選択をWB-MPCと統合する。
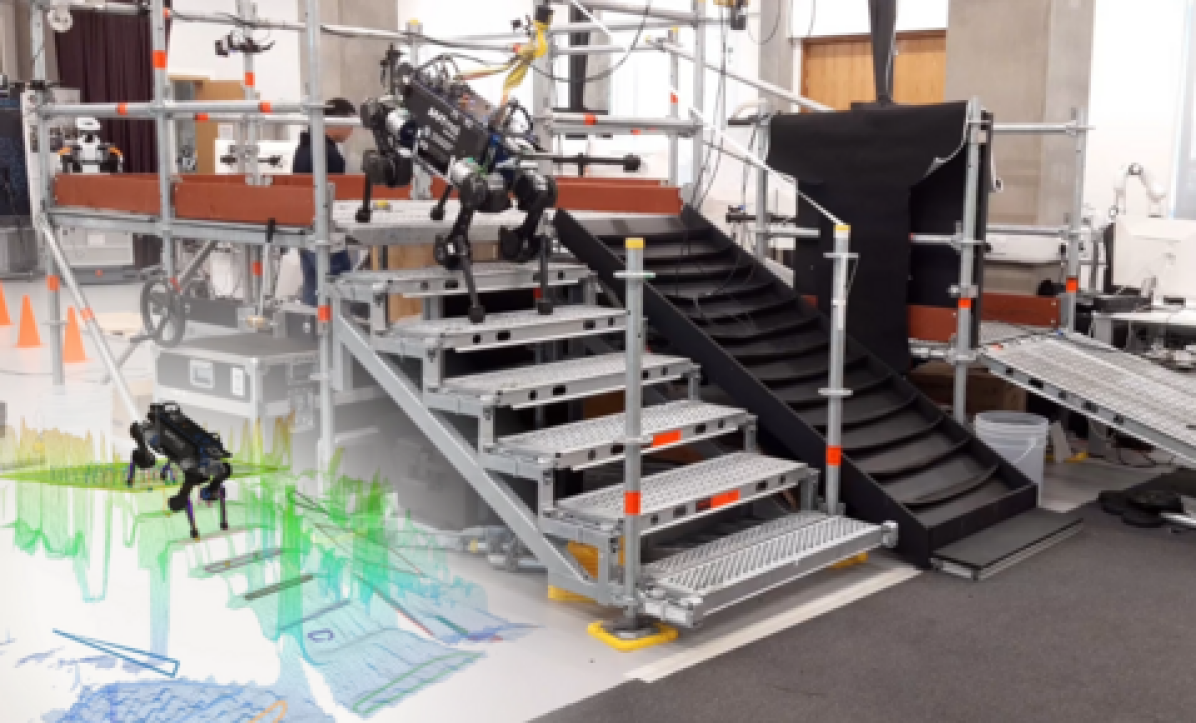
- 難易度の高い地形とICRA 2023の四足歩行シミュレーションで手法を実証する。
提案手法
- 50 HzでMPC出力と同期して接触位置を更新しつつ、接触計画を全身MPCから分離する。
- 次のステップ(6–8ステップのホライズン)に対して凸形接触面を選択する表面選択MIPを用いる。
- 地形高低測定マップから抽出された凸面の結合として表面を表現し、マージンと凸分解でそれらを精練する。
- Bezier軌道に基づく足の軌道生成と衝突のないQPを用いてオンラインで足の配置を適応させる。
- IMU、車輪オドメトリ、LIDAR補正、深度カメラを組み合わせた状態推定器を統合して、約1 Hzで地形高低マップを構築する。
- トルク制限の下で運動を合成するためにWB-MPCを用いたリカッチ利得コントローラを使用する。
実験結果
リサーチクエスチョン
- RQ1表面選択をWB-MPCから分離することで、実現可能性を損なうことなく高周波の再計画を可能にできるだろうか?
- RQ23–5 Hzのオンライン表面選択と50 HzのMPCが、知覚エラーや接触滑りに対する頑健性にどのように影響するか?
- RQ3難儀地形での信頼性の高い足運び配置において、凸面表面処理とマージンはどのような役割を果たすか?
- RQ4WB-MPCフィードバックを組み込むことで、ダイナミクスを抑えたアプローチと比べて知覚型歩行性能が向上するか?
主な発見
- 50 Hzで更新される表面再配置モジュールは、知覚エラーと滑りに対する頑健性を提供する。
- 3–5 Hzの表面プランナーは、複数の今後のステップに対して実現可能な凸面表面を効果的に選択する。
- 全体フレームワークは、難しい地形とICRA 2023のシミュレーションで最新の歩行性能を示す。
- 凸分解と安全マージンは、計画の複雑さを低減し、足配置の安全性を高める。
- トルク制限とエンドエフェクタ追従を備えたWB-MPCは、ベースライン手法と比較して摂動排除を強化する。

より良い研究を、今すぐ始めましょう
論文設計から論文執筆まで、研究時間を劇的に削減しましょう。
クレジットカード登録不要
このレビューはAIが作成し、人間の編集者が確認しました。